Hi Jan,
Ja, es gibt News. Ich wollte das eigentlich in einem gesonderten, schön dokumentierten Beitrag zelebrieren, aber da ich zwecks Zeitmangel noch nicht dazugekommen bin und Du eh grad danach fragst:
Ein paar Tage vor Weihnachten hab ich das Paket bekommen ! 
Hab grad mal ein paar schöne Foddos davon gemacht … schaaade, das ich im WIki nix mehr editieren kann, sonst könnte ich die Foddos hochladen und Euch zeigen
Inhalt:
-
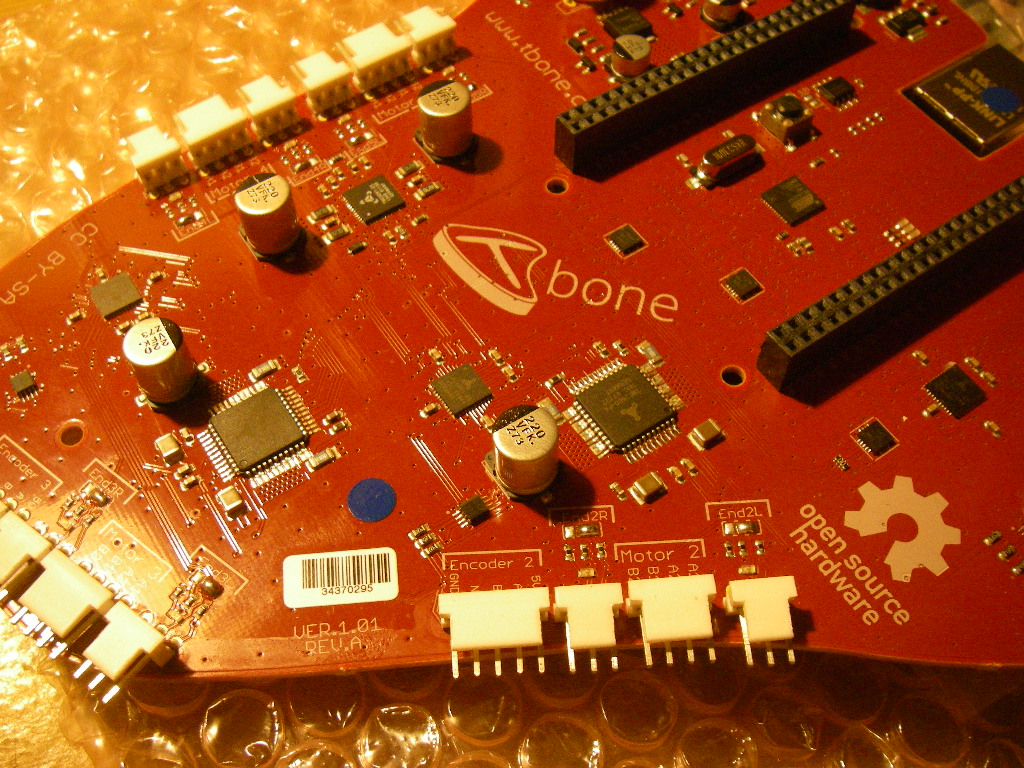
ein T-Bone Steak Also das MainBoard, leider haben die tatsächlich an dieser Wahnsinns-Form festgehalten, obwohl zwischendurchmal davon die Rede war, vielleicht dochleiber eine rechteckige Form zunehmen. Schade, aber egal, die Features des Boards machen das allemal wett. 5 Standard-Anschlüsse für Stepper Motoren, davon 3 mit bis zu 4A belastbar ==> CNC-Fräsen-geeignet ! Ausserdem gibts zu jedem Motor noch einen extra-Anschluss namens „encoder“… ich weiss zwar nicht genau was das bedeutet, aber womöglich könnte damit eine closed-loop-funktion gemeint sein, was megacool wäre. Oder aber das hat wasmitd er automatischen Endstop-Erkennung zu tun.
-
Ein USB-Kabel.
-
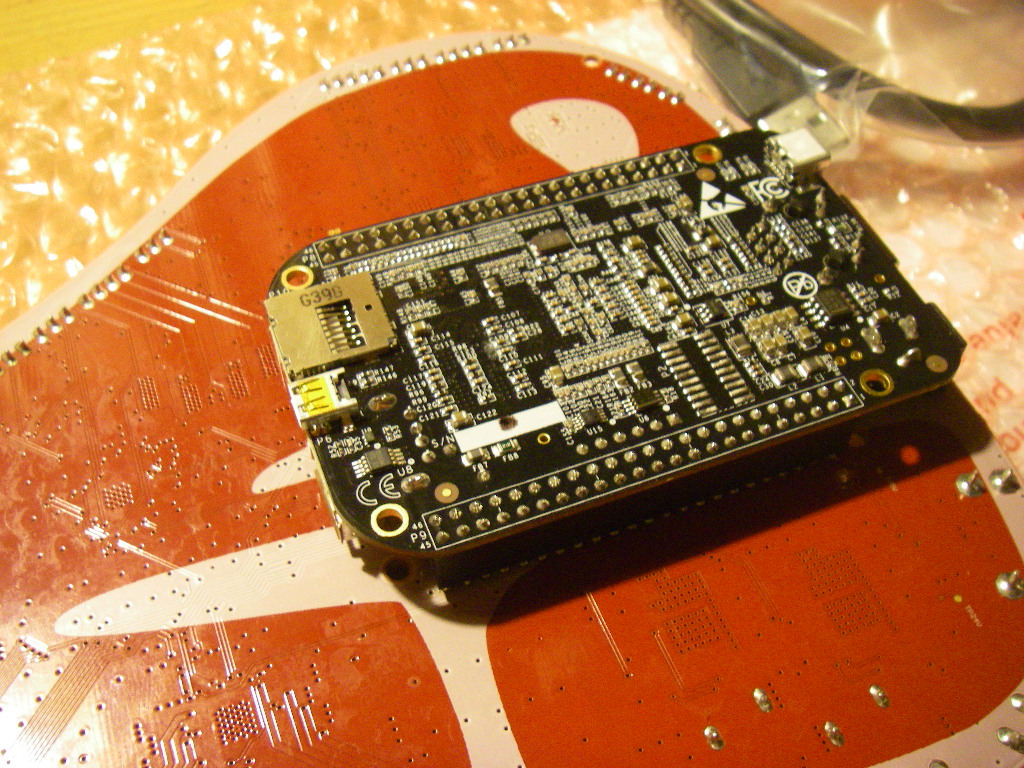
Ein BeagleBoneBlack. Immerhin ist dieses Board ja ein Cape dafür.
Eigerntlich wäre dies schon der versprochene Inhalt gewesen, aber, anscheinend als Gratis-Probe für Werbezwecke, war noch etwas anderes mit dabei, was meine Fantasie gerade heftig anregt:
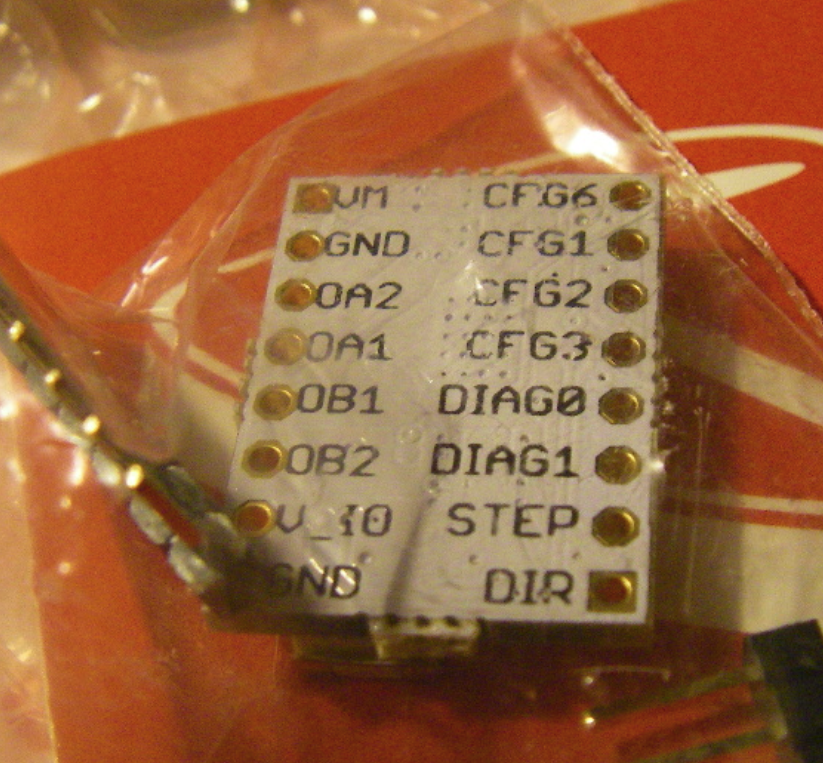
- Ein kleines Briefmarkengroßes Ding, was exakt so aussieht und dimensioniert ist, wie ein Pololu-Treiber. Allerdings mit etwas anderen Pinbelegungen und einem Trinamics-Chip darauf.
Wenn ich das richtig verstehe, dann ist das ein Stepper-Treiber im „Pololu-format“, aber mit Trinamics features. Dh. es wäre noch herauszukriegen, welche von den besonderen features lediglich auf dem T-Bone-Board implementiert sind, und welche auch in diesem kleinen Treiber stecken, also zB. sowas wie die automatischen endstop-erkennung. Mein Gefühl ist, das das auch auf dem kleinen treiber mit drauf ist. Du kannst den Treiber in etwa vergleichen mit diesem DRV-dingsbums-Treiber von Kliment, den Du schonverschiedentlich zitiert hast, im Gegensatz zu diesem dürfte dieser hier allerdings anstatt 1/32 auch über 1/256 Microstepping verfügen, zuzuüglich weiterer Features.
Ist also im ganzen ein echt heisses state-of-the-art, oder noch besser: Next-Generation-Teil.
Marcus Nowotny (tbone):
Thanks!
The board comes with it’s own firmware since we are not using stepper drivers but motion controllers. The firmware will read GCODE – so it is integrate to al slicing programs. The GCODE will be kept compatible with the MARLIN firmware.
[Source: > http://www.tbone.cc/faqs/ > official T-Bone answer to 1st comment]
The board comes with it’s own firmware since we are not using stepper drivers but motion controllers.
Excuse me, you want to tell us a stepper driver isn’t a motor controller? How to you want to control motion without controller actuators?
Vielleicht kann ich das beantworten. Ich glaube, er will damit nur sagen, dass das Board keine dedizierten Stepper-Treiber, a la Pololu-briefmarkenformat zum draufstöpseln beinhaltet, sondern das diese fest in das Board implementiert sind. Wiso er das nun als „motion-controller“ anstatt „stepper-driver“ bezeichnet istmir auchnicht so ganz klar. Vielleicht ist das so ein Marketing-Ding, etwa um zum Ausdruck zu bringen, das es noch wesentlich mehr kann und innovative features hat, als die regulären stepper.driver.
The firmware will read GCODE
OK
- so it is integrate to al slicing programs
??
The GCODE will be kept compatible with the MARLIN firmware.
You said the program reads GCODE and now you say it will keep the GCODE compatible with the MARLIN firmware, which somehow implies you output GCODE too.
I beg for clarification.
Er will damit sagen, dass das Board GCode versteht, genau wie jede RAMPS-basierte 3D-Drucker-Steuerung und die meisten CNC-Fräsen. Den vollen Umfang der GCODE-Befehle kann man zB. unter
http://reprap.org/wiki/G-code
einsehen. Dabei fällt auf, dass etliche Sequenzen speziell etwas mit 3D-Druckern zu tun haben (im gegensatz zur reinen CNC-Fräse), also etwa Befehle für den Extruder.
Die meisten (oder viele) 3D-Drucker benutzen RAMPS1.4 Steuerung, das ist im wesentlichen ein Arduino mit einer Huckepackplatine mit diversen Anschlüssen für Pololu-Treiber, Sensoren und ein paar Mosfets für den Extruder und das Hitzebett.
Man kann aber unterschiedliche Firmware auf dem Arduino haben. Marlin, Teacup, Repetier, Sprinter, wären einige davon, um mal ein paar Namen zu nennen. Allen gemeinsam ist, dass sie im Prinzip GCODE-Interpreter sind, welche den GCODE parsen und in Koordinaten und Aktionen überstzen, die direkt in den Stepüper-Treiber eingefüttert werden. Der GCODE selbst wird dabei von einem Host (meistens ein externer PC oder ein Laptop) seriell empfangen.
Allen gemeinsam ist auch, das sie eine gemeinsame Schnittmenge von GCODEs unterstützen, also in etwa das, was zum Betrieb eines 3D-Druckers unbedingt notwendig ist.
Darüber hinaus gibt es aber auch etlicher GCODEs, welche besondere oder spezifische Features unterstützen, z.B. ob ein Extra-Lüfter das zu druckende Teil gesondert kühlen soll, oder sonstige Schmankerln.
Wieweit solche Zusatz-features GCODE-mässig unterstützt werden, darin unterscheiden sich die Firmwaren. Während Firmwares wie Marlin und Repetier sicherlich eine sehr weitgehende Unterstützung der speziellen GCODEs haben, benutze ich z.B. dagegen Sprinter, eine sehr alte und rudimentäre Software, die nur die nötigsten GCODEs implementiert hat und unterstützt.
Der Vorteil von Sprinter besteht aber für mich darin, das der Code super klein und auf das nötigste beschränkt ist und es mir von daher wesentliche rleichtert, mich darin zurechtzufinden und nach belieben darin rumpfuschen zu können
Anders wäre es mir z.B. kaum mögflich gewesen, mir eine spezielle Sprinter-Version für meinen Bohrautomaten, also eine CNC-Fräse, zurechtzustricken, welche z.B. unterstützt, das bei meinem Bohrautomaten jede Achse symetrisch durch zwei Motoren angetrieben wird. Das ist etwas das es ansonsten weder bei irgendeinem Drucker noch bei irgendeiner CNC-Fräse gibt und von daher eine Selbst-Strick-Lösung erforderte und Sprinter war dafür ideal.
Aber ich schweife ab.
Langer Rede kurzer Sinn ist, dass in der aktuellen Firmware-Version vomTBone offenbar alle GCODEs implementiert sind, die zB. auch Marlin versteht … woraus man folgern kann, das Marlin im gegensatz zu Sprinter eine wesentlich größere Teilmenge an GCODEs unterstützt.
Jetzt kommt abernoch etwas hinzu, es war ja auch die Rede davon das GCODE von Slicing-programmen unterstützt wird. Damit sind jene Prorgramme gemeint, die extern auf dem Host laufen und den GCODE aus 3D-Objekten erstmal überhaupt erzeugen.
Eines der ältesten und ersten Slicer-Programme, welches aber erstaunlicherweise selbst heute noch recht weit verbreitet ist (obwohl es grotten-langsam ist … es ist in Python geschrieben) und als eine Art Referenz gilt, das ist Printrun bzw. Pronterface. Andere Namen wären zB. Repetier-Host (ja, genau, die Host-Software zu der vorher schon erwähnten Repetier-Firmware), Cura, oder Slic3r, welches ich mittlerweile auch verwende, da es einfach wesentlich schneller ist als Pronterface und auch einige wichtige Zusatz-Features bietet, und auch einen performanteren GCODE erzeugt.
Alle diese Host-Softwaren laufen normalerweise wie gesagt auf einem externen Host (Oh Wunder ) also einem PC oder einem Laptop.
Das TBone ist nun aber seineszeichens ein „Cape“, dh. ein Huckepack-Board (ähnlich wie ein Shield beim „Arduino“) für einen BeagleBoneBlack.
Was bedeutet, das dieser zusätzliche Host-PC nun nicht länger benötigt wird, denn alles was der kann, kann der BeagleBoneBlack mit seinem Linux auch.
Dh., externer-Host-PC + Arduino + RAMPS-Platine sind hier verschmolzen zu BeagleBoneBlack + Cape (TBone).
Gleichzeitig wird damit die 8-Bit AVR Arduino-Plattform durch eine 32-Bit AVR ARM-Cortex Plattform ersetzt, entspricht also nach maßstäben der 3D-Drucker-Welt einer Steuerung der nexten Generation - also ein brandheisses Eisen Abgesehen von weiteren Features beitet sich durch diesen Shift von 8-Bit auf 32-Bit auch ein Geschwindigkeitsvorteil. Und bezogen auf neue Features hat speziell das TBone mit seinen Trinamic-Treiberchips nochmals die Nase vorn.
OK, das war vielleicht jetzt etwas sehr ausführlich, aber zumindest soillte damit erklärt sein, warum das TBone nicht nur GCODE interpretieren kann, sondern diesen auch gleichezitig „out-putted“
Gruss, Oliver