Hi Jan,
Naja, das ist 3D, wir brauchen aber auch 2D-Dimensioning. Hast Du denn bei Dir das Script schon am laufen ? Ich müsste erstmal meine Blenderversion von 2.63 auf 2.69 upgraden.
Was mich dagegen mehr interessieren würde: Wie machst Du das mit der BOM, hast Du da auch ein Py Script für ?
Aber warte, die Dimensionierung (Skalierung) ist doch jedem selbst überlassen oder nicht? Müssen wir uns wirklich darum kümmern? Kann doch jeder die Teile um den Faktor 10 kleiner kaufen, wenn man will. Nicht dass das noch ein Riesenbaukasten wird. > 
Doch  Theoretisch kann der Baukasten beliebig viele Teile enthalten bzw. darauf erweitert werden. Und Du könntest mit allen schon virtuell konstruieren. Brauchst Dir dann später nur diejenigen Teile in real zu besorgen (oder anzufertigen), die Du auch wirklich für das Gerät brauchst.
Theoretisch kann der Baukasten beliebig viele Teile enthalten bzw. darauf erweitert werden. Und Du könntest mit allen schon virtuell konstruieren. Brauchst Dir dann später nur diejenigen Teile in real zu besorgen (oder anzufertigen), die Du auch wirklich für das Gerät brauchst.
Prinzipiell bleibt die Dimensionierung natürlich jedem selbst überlassen. Nur hast Du, wenn Du Bauteile aus dem Uniprokit verwendest, den Vorteil, dass 3D- und 2D-Pläne bereits existieren. Und Du hast auch ne bessere Chance, das jemand vielleicht schon genau diese Teile anfertigt und anbietet. Dazu bietet das Baukastensystem in der Auswahl seiner Standardlängen bzw. Größen von Bauteilen eine Art Empfehlung für in der Praxis besonders sinnvolle, typische, oder häufig Vorkommene Maße.
Theoretisch kannst Du auch z.B. einen Lineartrieb auf irgendein krummes Längenmaß, wie sagen wir mal 37.3cm setzen. Du könntest selbst dann noch für alles andere den Baukasten nutzen und würdest einfach nur bei dem jeweiligen Bauteil die Länge in der Realität verändern, indem Du z.B. beim nächstlängeren Tslot-Profil aus dem Baukasten einfach etwas absägst oder Dir gleich eins in der passenden Länge besorgst.
Je mehr Bauteile aus dem System Du in der Konstruktion benutzt, desto mehr kannst Du die genannten Vorteile in Anspruch nehmen.
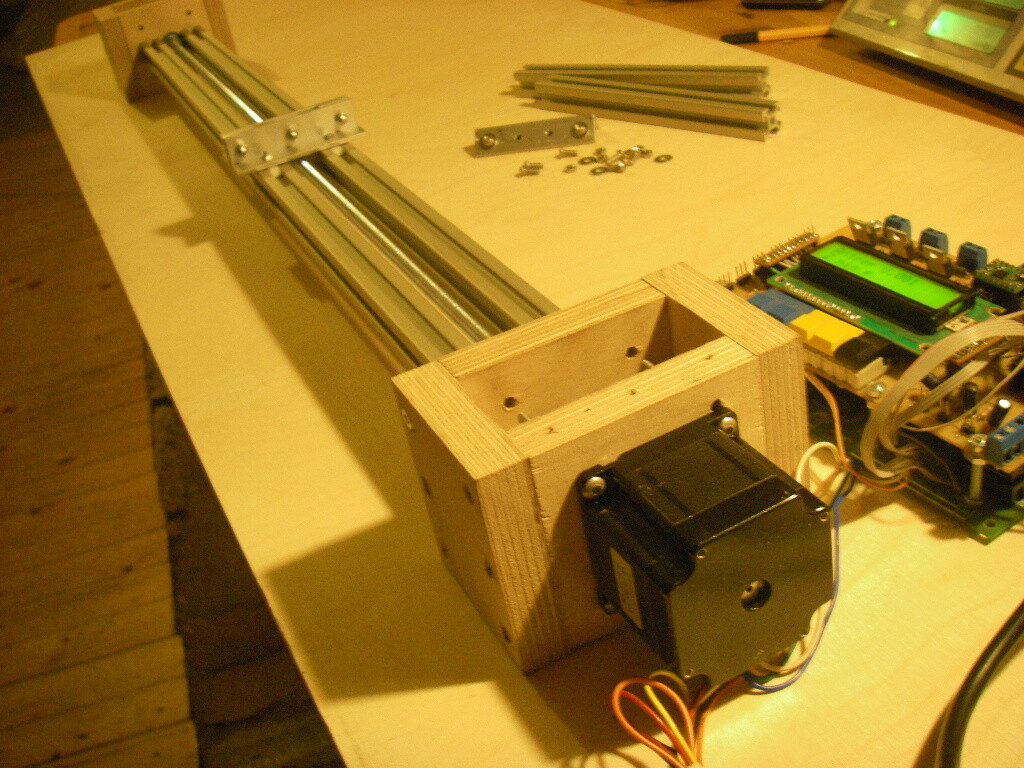
Wir benutzen ja für den 3D-Drucker auch kein in der Standard-Housing Reihe enthaltene Dimensionierung indem wir zweimal die 40er Länge verwenden. Macht aber nix, weil das ja ein bei den Linartrieben Standardmaß ist, ich brauch hier also nur zweimal den gleichen zu verwenden.
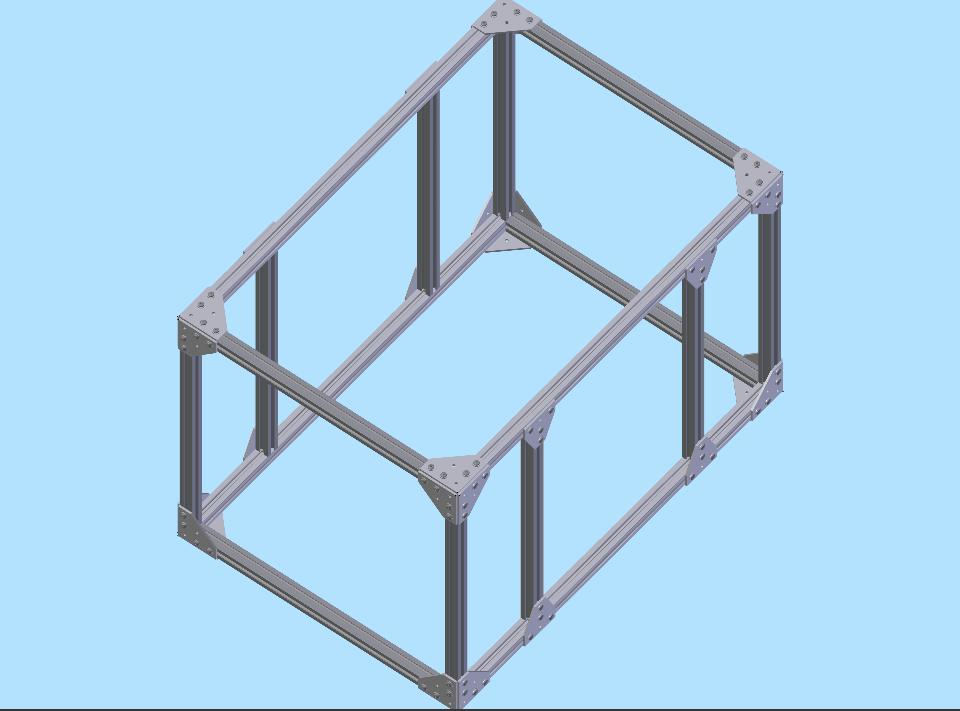
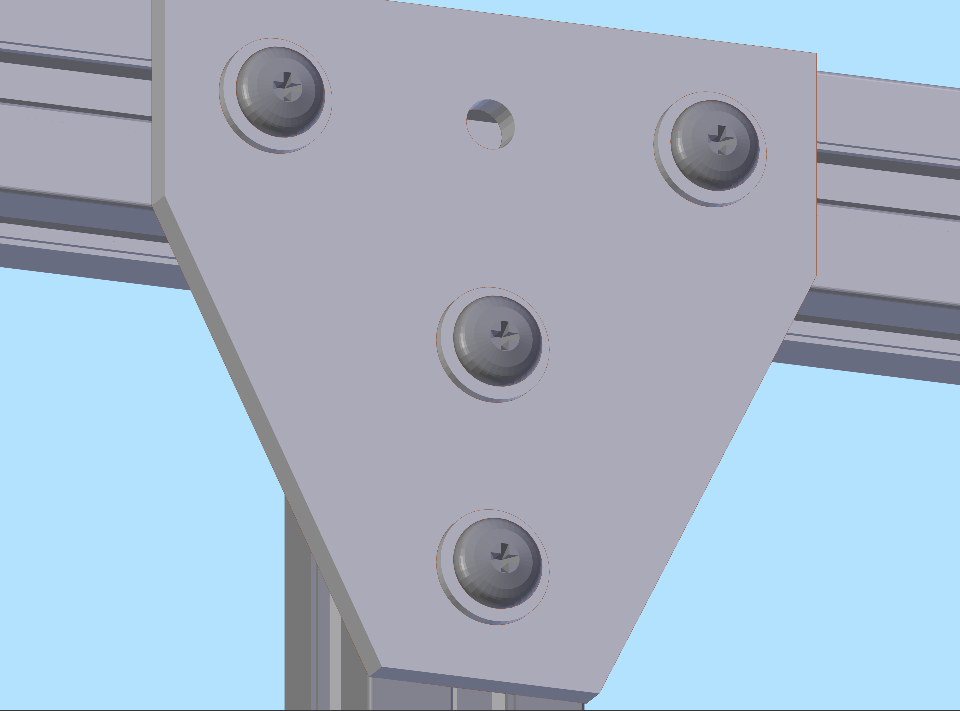
Also keine Sorge, ich wollte damit nicht den bisherigen Bauplan in Frage stellen, sondern das Konzept nur erweitern, von standardisierten Bauteilen hin zu standardisierten Baugruppen. Kostet etwas mehr Konstruktions- und Dokumentationsaufwand, aber solche Housing-Kisten kann man immer mal gebrauchen.
Und ich bin grad dabei, eine Library zu erstellen, welche ausschliesslich aus den Teilen aus dem Basis-Set besteht. Und anschliessend noch eine separate für das Lineartrieb-Set. Du hast in Deiner Lib noch viele andere nützliche Sache, die sollte man durchaus auch zum arbeiten haben, aber sowas würde ich gerne in eine eigene Lib separieren. ZB. diese ganzen Text- und Caliper-Objekte.
Ist es nicht auch egal, ob die Platine auf einem 40cm x 20cm Bett gefräst wird oder ob es nun 20cm x 20cm ist, solange die Genauigkeit die gleiche ist?
Doch. Aber mir fiel halt auf, das die meisten Platinenfräsenprojekte immer mit möglichst kleinen und kompakten Dimensionen ausgestattet sind, und der Grund ist schätzungsweise, dass Du bei einem kurzen Bauteil eine vergleichsweise größere Steifigkeit hast und genau die ist relevant für die Genauigkeit.
Aber in Bezug auf unser Modell mache ich mir da erstmal keine großen Sorgen, wir bewegen uns mit unseren Max 64cm glaubich noch in einem Bereich, wo sich das noch nicht so gravierend auswirkt (hoff ich jedenfalls).
Mein neues Konzept bedeutet nur, wer will, kann die Dimensionierung auch einfach nur durch Austausch mit z.B. dem nächstkleineren (oder irgendeinem anderen) Standardmaß für ein Längenbauteil ändern. Damit eröffnen sich dem Benutzer weitere Freiheitsgrade in der Ausgestaltung seiner Multimaschine, so dass diese ihrem Namen hier in besonderer Weise gerecht wird. Multi- nicht nur bezogen auf Funktionen, sondern auch auf Dimensionierungen.
Ist da wirklich zwischen 3D-Drucker und Platinenfräse so ein großer Unterschied? Und selbst wenn der 3D Drucker 2m x 2m x 10m groß wäre, um eine Statue zu drucken, selbst dann müsste sie noch genau genug sein, um Details zu drucken und damit müsste auch eine Platine noch immer einigermaßen fräsbar sein (da vorwiegend X- und Y-Auflösung relevant).
Ich hab noch keine gebaut, aber beim fräsen wirkt sich zB. eine geringe Höhenungenauigkeit auf die winklige Frässpitze dahingehend aus, das die Breite der Leiterbahnen massiv schwankt. Und damit begrenzt Du auch wie deine maximale Auflösung auf der Platine ist, d.h., wie grob oder fein die möglichen Strukturen.
Aber keine Sorge, wir bauen das Ding schon so groß wie bisher angedacht, schliesslich will man als Entwickler ja auch die Grenzen ein bischen antesten
Gruss, Oliver
{kind=link}