dass wir um Riemenantrieb in der X- und Y-Achse nicht herumkommen.
Microstepping für hohe Präzision trotz hoher Geschwindigkeit erforderlich. Ausserdem verringert es die Gefahr des Pendeln durch Übersteuern bei der Regelung. Vorausgesetzt wir können den Strom zuverlässig messen, eine Bedingung für Microstepping allgemein.
… (Repository!)
Punkto Elektronik könnten wir unsere Präferenzen mischen:
Hier mal meine Vorstellung: BeagleBoneBlack oder RaspberryPi auf dem sich die Slic3r Open Source Alternative CuraEngine + LinuxEMC befindet. Im 3D-Drucker selbst ein low-cost <10€ uC (AVR, PIC oder ARM) auf dem RODOS läuft, wo dann wiederrum Sprinter_?_ seine Schleifen dreht. (oder jedes beliebige andere 3D-Drucker-Steuer-Programm). freecad_convert.py.tar.gz (10 KB)
Die meisten Teile vom Cartesio haben wir jetzt mit unseren eigenen ersetzt. Die Spezial-Teilanzahl sinkt enorm. Hier, wie wir die komplizierte, 3D-gedruckte Riemen-Stopp-Funktion von Cartesio durch unser UniProKit ersetzen (könnten):
Dass ich 0 Knoten und Kanten in der Szene habe ist kein Bug in Blender. In blender kann man mit echten Referenzen arbeiten, null Speicherbelastung, wenn man das durchzieht.
Edit: HOG 3D PlaDruMas ist fast fertig. Erstmal mit Frässpindelhalter anstelle eines Extruders. Die Konstruktion konnte immer wieder vereinfacht werden, jetzt haben wir also wirklich eine Low-Cost-Variante, die wir einfach bauen müssen. Verbessern müssen wir zwar noch so einiges, aber immerhin der Anfang ist gemacht. Danke Oliver! Wir müssen’s anpacken, sonst wird’s nicht mit dem Open source Traum.
Nette Idee, wird aber in der Praxis kaum funktionieren. Zum einen, weil das Slidermaterial zu weich bzw. wenig stabil sein dürfte. Aber was noch wichtiger ist: Du hast keine Möglichkeit, die Schraube auf der anderen Seite festzuhalten, wenn Du sie anziehst
Ich hab mir auch schon viele Gedanken über so eine Art von Eckverbinder gemacht, bion aber noch zu keiner abschliessenden lösung gekommen. Für Fälle mit geringeren Stabilitätsanforderungen könnte ein 3dgedrucktes Plastikteil sinnvoll sein, d.h., so eine Art Würfel mit Fortsätzen, welche den T-Slot-Profilnuten entsprechen. Sowas in der Art gibts auch auf Thingiverse. Und für stabilere Anwendungsfälle, wo man eine Verbinder aus Metall haben möchte, käme vielleicht sowas in Frage wie diese nette Würfel-Eckverbindung, die beim Cubespawn-Projekt (
) zum Einsatz kommt. Wenn ich diesen Würfel richtig verstehe, dann ist so ein Kanal-Loch für eine Schraube auf der einen Seite so eng wie das Schraubengewinde und auf der anderen Seite des Kanals so breit wie der Schraubenkopf, damit der auch noch mit druchpasst. Durch das breitere Loch kann man dann den Schraubenzeiher zum anziehen führen und geschraubt würde dann z.B. in eine Hammermutter, weclhe in der Nut beim Gegenstück sitzt und sich von selbst kontert.
Leider geht zumindest für mich aus dem Cubespawn_projekt nicht hervor, wo man die Würfel bekommen kann, oder ob die die selbst herstellen oder wasweissich. Abgesehen davon bin ich mir auch nicht sicher ob so eine Lösung schon bei einem 20x20mm Profil funktionieren würde (wegen der Dicke eines gegebenen Schraubenkopfes) oder das erst ab etwas größeren Maßen (zb. 40x40) funktioniert.
Ähm, irgendwie werd ich aus der Zeichnung noch nicht so recht schlau Ausserdem geht das schon sehr ins Detail bzw. ich bin, zumindest mental, nicht sooo eng beim Cartesio, als das es da in den Details wie Riemen-Stop nicht noch Abweichungen geben könnte.
HOG 3D PlaDruMas ist fast fertig. Erstmal mit Frässpindelhalter anstelle eines Extruders. Die Konstruktion konnte immer wieder vereinfacht werden, jetzt haben wir also wirklich eine Low-Cost-Variante, die wir einfach bauen müssen. Verbessern müssen wir zwar noch so einiges, aber immerhin der Anfang ist gemacht. Danke Oliver! Wir müssen’s anpacken, sonst wird’s nicht mit dem Open source Traum.
Was mir im Moment eher weiterhelfen würde, das wäre einfach nur erstmal eine Konstruktion des Rahmens, als erster Schritt. Kannst Du davon mal einen Screenshot machen ?
Okay, it may not be good, but hey, here it is: HOG 3D PlaDruMas. The principle is already known, as simplest and best solution. So if anyone finds a easier solution that still fulfills the same job or better - feel free to leave a comment and we’ll change it.
[Interkonnekt] wird aber in der Praxis kaum funktionieren. Zum einen, weil das Slidermaterial zu weich bzw. wenig stabil sein dürfte. Aber was noch wichtiger ist: Du hast keine Möglichkeit, die Schraube auf der anderen Seite festzuhalten, wenn Du sie anziehst >
Mit einem Gewindeschneider müsste es doch klappen!? Einfach von beiden Seiten 5,5mm Gewinde einschneiden, Interkonnekt (Slider Element mit Loch) rein und festschrauben. Wenn das Material zu weich ist, muss ich wohl ein anderes nehmen. Es soll auch nicht bombenfest sein, sondern noch immer sliden. Das macht alles viel einfacher. Die Riemen (4-fach bei der X-Achse) geben die nötige Stabilität. Und Geschwindigkeit noch dazu.
Ich hab mir auch schon viele Gedanken über so eine Art von Eckverbinder gemacht, bion aber noch zu keiner abschliessenden lösung gekommen. Für Fälle mit geringeren Stabilitätsanforderungen könnte ein 3dgedrucktes Plastikteil sinnvoll sein, d.h., so eine Art Würfel mit Fortsätzen, welche den T-Slot-Profilnuten entsprechen. Sowas in der Art gibts auch auf Thingiverse. Und für stabilere Anwendungsfälle, wo man eine Verbinder aus Metall haben möchte, käme vielleicht sowas in Frage wie diese nette Würfel-Eckverbindung, die beim Cubespawn-Projekt (Image) zum Einsatz kommt. Wenn ich diesen Würfel richtig verstehe, dann ist so ein Kanal-Loch für eine Schraube auf der einen Seite so eng wie das Schraubengewinde und auf der anderen Seite des Kanals so breit wie der Schraubenkopf, damit der auch noch mit druchpasst. Durch das breitere Loch kann man dann den Schraubenzeiher zum anziehen führen und geschraubt würde dann z.B. in eine Hammermutter, weclhe in der Nut beim Gegenstück sitzt und sich von selbst kontert.
Wird schon noch.
Wir könnten auch eine Gewindestange (bei uns konkret ein paar mal 400 mm + 640 mm Länge) durch stecken und dann zwei Metallstücke je von links und rechts dranschrauben. Wie du schon gesagt hast - vielleicht in Würfel oder T-Slot Form. Kontert sich wegen des gegenläufigen Gewindes auch selbst.
Meist habe ich aber deine genialen Slider verwendet! Das hat die Sache nochmal enorm vereinfacht. Gute Arbeit dude. Mir gefällt der Entwurf so gut, dass ich ihn im Sommer testen werde.
Und nachdem wir das erledigt hätten, kann’s gleich nachher mit den Schaltplänen weitergehen … (die Zeit läuft uns davon, denn nächste Woche ist wieder Lehrer-Projekt Vollzeit. Halleluja.)
Ähm, irgendwie werd ich aus der Zeichnung noch nicht so recht schlau > > Ausserdem geht das schon sehr ins Detail bzw. ich bin, zumindest mental, nicht sooo eng beim Cartesio, als das es da in den Details wie Riemen-Stop nicht noch Abweichungen geben könnte.
Haha. Keine Sorge, kriegen wir schon. Der Prototype hat auch die Riemenhalterungen schon umgesetzt, wird mit unseren Flach 20x20x40 (alles mm) zusammengequetscht und gleichzeitig noch umgelenkt, damit’s auch sicher nicht durchflutschen kann.
Was mir im Moment eher weiterhelfen würde, das wäre einfach nur erstmal eine Konstruktion des Rahmens, als erster Schritt. Kannst Du davon mal einen Screenshot machen ?
Das ist doch mal ne vernünftige Grundlage ! So hab ich mir das vorgestellt von wegen erst mal den Grundrahmen, wobei die weiteren Elemente die Du da schon zugefügt hast natürlich ebenfalls sinnvoll und hilfreich sind.
Ja, ich hab schon etliche Änderungsvorschläge, aber zuvor möchte ich noch mal lobend anmerken dass Du mit diesem Entwurf schon mal mindestens zwei Dinge sehr gut umgesetzt hast, nämlich einmal, Dich nicht zu eng an Cartesio zu halten bzw. diesen zu kopieren und zum anderen das KISS-Prinzip, d.h., die Sache erstmal nicht unnötig kompliziert zu gestalten.
Jetzt zum Entwurf selbst:
Jetzt verstehe ich auch, was Du mit „verkanten“ meinst, ich hatte das zunächst in nem etwas anderen Sinn verstanden. Aber so wie es ist wird die Z-Achse auf jedenfall verkanten insbesondere, wenn Du nur an einer Seite bzw. unten daran ziehst.
Macht aber nichts, weil wir das ohnehin ändern sollten. Im aktuellen Entwurf bewegst Du die Gantry zusammen mit der Z-Achse, was m.E. unnötige Belastung bedeutet. Ausserdem hängt das ganze Gewicht der Gantry an den Slidern zwischen der Z-Achse und wenn eine Frässpindel dranhängt würde dies obendrein noch eine Verdrehungsbelastung in den Slidern bewirken.
Meiner Meinung nach sollte die Gantry schon wie beim Cartesio auch oben liegen, damit ist dann keinerlei Zugbelastung das Gantrygewichtes auf den Slidern, und der Motor muss lediglich die Reibungskraft überwinden um die Gantry zu bewegen, aber nicht noch das Gewicht der Gantry selbst irgendwie mittragen (ich weiss nicht so richtig wie ich das formulieren soll). Desweiteren sollte die Z-Achse m.E. nicht die ganze Gantry bewegen, sondern lediglich das Druckbett langsam und Stück für Stück absenken, was eine minimale Gewichstbelastung bedeutet. Das ist ebenso wie beim Cartesio, aber auch Ultimaker und vielen anderen und m.E. ein ganz gutes Prinzip.
Die Gantry selbst würde ich nicht nur mit einem T-Slot-Profil realisieren sondern mit zweien und den Fräser bzw. Druckkopf mittig dazwischen plazieren, so dass der Halterungsschlitten eher eine horizontale Lage hat anstatt eine vertikale. Andernfalls hast Du eine eher einseitige Gewichtsbelastung welche die bereits erwähnte Verdrehungsbelastung bewirkt.
Soweit erstmal der wichtigste Designs- und konzeptionelle Aspekt.
Was mir noch desweiteren spontan einfällt:
Ev. sollte man auf der langen Seite (ca. 64cm) noch jeweils 2 aufrechte Stützstreben miteinbauen, vielleicht im Abstand von 15cm von jedem Ende aus.
Die Befestigung der Slider mit nur einer mittigen Schraube erscheint mir nicht ausreichend und auch die dann beim Tslot so schlicht vor Kopf zu verschrauben finde ich etwas gewagt. Eigentlich wars so vorgesehen dass ein Slider mit 2 Schrauben an einer Trägerplatte befestigt wird und somit einen Schlitten bildet. Desweiteren würde ich für die Bewegeung eines (größeren) Elements (wie der Gantry) auch nicht 2 sondern 4 Slider (je zwei mit etwas Abstand zueinander, entweder auf einer langen oder zwei kurzen Trägerplatten) verwenden damit das Gewicht besser verteilt wird. Dadurch verliert man zwar einiges an Platz aber intuitiv glaube ich dass es für die Schlittenbewegung besser ist.
Die Slider der Druckplattform könnten in den eben erwähnten zusätzlichen Stützsstreben der Langseite laufen.
Auf den kurzen Seiten des Rahmens würde ich jeweils mittig die Trapezspindel plazieren welche die Druckplatte liftet. Beide Trapezspindeln sollten anders als beim Cartesio einen eigenen Motor haben, damit spart man sich dieses H-Belt Gefrickel.
Jetzt noch was zu den Verbindungen:
Mit einem Gewindeschneider müsste es doch klappen!? Einfach von beiden Seiten 5,5mm Gewinde einschneiden, Interkonnekt (Slider Element mit Loch) rein und festschrauben.
Wo Gewinde reinschneiden ? In den Slider oder in den runden Kanal ind er Mitte vom Tslot ? Letzteres geht sehr gut, (vor allem wenn man den Gewindeschneider in den Akkuschrauben einspannt und gut aufpasst dass der am Ende nicht abbricht ) allerdings müsstest Du ein M6er Loch schneiden, (5.5mm ist schon der Kanal) was bedeuten würde das das Loch beim Slider im unteren Bereich (also der Stiel vom T) alles Material wegnimmt, was die Stabilität deutlich beeinträchtigen dürfte, auch wenn Du die Slider deutlich verkürzt hast.
Wenn das Material zu weich ist, muss ich wohl ein anderes nehmen. Es soll auch nicht bombenfest sein, sondern noch immer sliden.
Ja, schon klar, aber ich schätze das geht auf Kosten der Stabilität, d.h., da Du ja gleichzeitig noch Gewichstbelastungen drauf hast würde das Ganze schnell auslabbern.
Das macht alles viel einfacher. Die Riemen (4-fach bei der X-Achse) geben die nötige Stabilität. Und Geschwindigkeit noch dazu.
Naja, und wo zieht der Riemen dran ? Die Verbindung Slider und Tslot wird durch den Zug des Riemens auf jedenfall belastet.
Ich schätze an dieser Stelle liegts einfach in der Natur der Sache, dass man nicht Beides gleichzeitig haben kann, ich würde prinzipiell die Slider immer so verwenden, dass sie möglichst horizontal in ihrer Führung ruhen und das Gewicht immer von oben darauf lastet. Und in Fällen wo es zwingend um eine vertikale Bewegung geht, wie z.B. bei der Z-Achse muss die Belastung auf mehrere Slider, also etwa 4 anstatt nur 2 verteilt werden. Denke, damit ist man auf der sicheren Seite.
Abgesehen davon ists, was die Verbindungen betrifft, m.E. auch gar nicht notwendig das so zu machen. Diese kleinen WInkelchen, die Du eingezeichnet hast sind schon das Mittel der Wahl um die Ecken zu stabilisieren, allerdings benötigen die noch eine diagonale Versteifung, da der Metallwinkel ansonsten noch federn könnte.
Solche Eckverbinder gibts schon, siehe
und ich hatte ohnehin vor, die gelegentlich mit in das Baukastensystem aufzunehmen. Ausser der Diagonalversteifung haben die auch noch ein kleine Nase, die perfect in die Nute beim Tslot reingreift und zusätzliche Stabilität bringt, ich hab schon ein paar Testexemplare hier, die sind wirklich sehr gut. Nicht so toll ist allerdings der Preis, woebi ich darauf setze, dass es nicht in allen Fällen aus Metall sein muss, sondern in vielen Fällen eine gedruckte Plastikversion schon ihren Zweck erfüllt, das wichtige ist dabei die Diagonalversteifung.
Und , wo wir schon dabei sind, ich würde für die Eckverbindungd desweiteren die L-Stücke aus dem Bausatz verwenden, die haben nämlich ebenfalls eine Diagonale und sind optimal um den Rahmen gegen Scherbwegeungen abzusichern und bombenfest zu machen, soll heissen, eine Kombination aus den L- Verbindern plus diesem vorgenannten Eckstückchen sehe ich als das Mittel der Wahl an.
Man könnte im Einzelfall bzw. bei Bedarf noch eins drauf setzen und das wäre in den Tslot ein Loch bohren so dass eine direkte Schrubverbindung möglich wird. Da spricht eigentlich nicht viel gegen und z.B. beim Mendelmax1.5 sind auch die oberen Rahmenstücke mit den schrägen auf diese Weise verbunden, soll heissen,. ich habs schon in der Praxis getestet und es hält wirklich sehr gut. Allerdings würde ich dennoch auch bei einer solchen Verbindung noch mindestens die L-Verbinder ergänzen um zu verhindern, das bei Scherkraftbelastungen des Rahmens die Verbindungslöcher nicht mit der Zeit auslabbern.
Soweit die aus meiner Sicht bestehenden Optionen für die Eckverbindungen, was man unterm Strich da rausziehen kann ist, dass man auf jedenfall im Entwurf problemlos die Tslotprofile stumpf aufeinandersetzen kann, so oder so.
Wir könnten auch eine Gewindestange (bei uns konkret ein paar mal 400 mm + 640 mm Länge) durch stecken und dann zwei Metallstücke je von links und rechts dranschrauben. Wie du schon gesagt hast - vielleicht in Würfel oder T-Slot Form. Kontert sich wegen des gegenläufigen Gewindes auch selbst.
Zuviel Material- und Gewichtsaufwand und überdies nicht notwendig, weil Du, wie oben beschrieben, absolut easy Gewinde in den Kanal schneiden kannst. Ich denke sogar, diese Gewinde and en Enden der Tslots sollten eigentlich ein Standardfeature bei den Baukastenteilen sein, d.h., die sollten alle standardmässig so ein Gewinde aufweisen.
Meist habe ich aber deine genialen Slider verwendet! Das hat die Sache nochmal enorm vereinfacht. Gute Arbeit dude. Mir gefällt der Entwurf so gut, dass ich ihn im Sommer testen werde.
Na, hoffentlich habe ich den positiven Eindruck jetzt nicht restlos zerstört
Und nachdem wir das erledigt hätten, kann’s gleich nachher mit den Schaltplänen weitergehen … (die Zeit läuft uns davon, denn nächste Woche ist wieder Lehrer-Projekt Vollzeit. Halleluja.)
Eins nach dem anderen, ich glaube bis das Teil fertig ist ists noch ein etwas weiterer Weg Aber zumindest schonmal ein Anfang.
Ich muss jetzt erst mal versuchen, selbst CAD-mässig ein Bein an die Erde zu kriegen, weils wahrscheinlich einfacher und punktgenauer ist, Ideen und Vorschläge gleich in einem CAD-Entwurf zu implementieren, anstatt das hier im Forum in Worten zu formulieren.
Ich werd als erstes mal versuchen, ob ich Deine Dateien in Blender und/oder Freecad reinladen und demzufolge bearbeiten kann. Und dann gehts ans Eingemachte, kann sein, dass ich dann noch den einen oder anderen Einsteigertip im Umgang mit diesen Programmen von Dir gebrauchen kann.
Und langfristig brauchen wir auch noch 2D-Ansichten und Bemaßungen, aber das macht wohl erst dann Sinn, wenn schon ein paar Sachen fixiert sind.
Jetzt verstehe ich auch, was Du mit „verkanten“ meinst, ich hatte das zunächst in nem etwas anderen Sinn verstanden. Aber so wie es ist wird die Z-Achse auf jedenfall verkanten insbesondere, wenn Du nur an einer Seite bzw. unten daran ziehst.
Bevor ich auf die anderen Punkte eingehe und die Änderungen umsetze, will ich schnell ein paar Pannen einräumen.
Natürlich sind 4 Riemen für die X-Achse geplant gewesen, also oben auch noch zwei. Ist mir im Wiki aufgefallen, aber kurzzeitig war die Blenderdatei korrupt und ich musste mich von dem Schock erstmal erholen. (Bei der Y-Achse brauchen wir 1 Riemen, bei der Z-Achse 2.)
Die Torsionslast ist wirklich nicht so toll. Ich habe die Gantry, also den Werkzeugschlitten zwar oben und unten in der ein-T-slotigen Y-Achse mit etlichen Slider Elementen modelliert, aber keine Detailbilder davon gezeigt. Meinst du, man kriegt es überhaupt so hin, dass nur oben die Last aufsitzt. Der Fräsbohrer oder Druck-Extruder muss ja irgendwie die Platte unten erreichen können und wenn sie mittig über der Y-Achse schwebt, wäre dann nicht immer die Y-Achse zwischen Bodenplatte und Dremel bzw. Extruder?
Die Z-Achse als fahrbahren Tisch zu gestalten wie üblich ist eine Option. Erhöht das die Teileanzahl nicht erheblich? So könnte man einfach eine Platte fix von unten gegenschrauben, die dem unteren T-Slot-Rahmen Festigkeit verleiht und natürlich das Heizbett trägt.
Ein Riesenpatzer: Der L-Lochwinkel den man auf einem Bild sieht, den brauchen wir gar nicht. Mein Fehler, dass ich den nicht rausgenommen habe!
Wirklich schwierig zu beschreiben, was man genau meint.
[…] auch nicht 2 sondern 4 Slider (je zwei mit etwas Abstand zueinander, entweder auf einer langen oder zwei kurzen Trägerplatten) verwenden damit das Gewicht besser verteilt wird. Dadurch verliert man zwar einiges an Platz aber intuitiv glaube ich dass es für die Schlittenbewegung besser ist.
Absolut. Ich mache mir auch Sorgen um die Drehkräfte, die auf die Z-Achse indirekt über die Hebelwirkung auf die Y-Achse (Gantryschlitten) wirken. Deine Idee, dass wir zwei T-Slot-Profile nehmen könnten, klingt super. Dann hat der Extruder/Fräsbohrer sozusagen zwei Füße anstatt wie ein Hebel des Archimedes an den Slider-Elementen der Z-Achse zu drehen. Super idee von dir!
Ich werd als erstes mal versuchen, ob ich Deine Dateien in Blender und/oder Freecad reinladen und demzufolge bearbeiten kann. Und dann gehts ans Eingemachte, kann sein, dass ich dann noch den einen oder anderen Einsteigertip im Umgang mit diesen Programmen von Dir gebrauchen kann.
Tipps von mir. … auweia, meine Kollegen meinen immer spaßhaft, ich solle mich lieber um Wandmalerei kümmern als struktur-kritische Teile zu designen.
Wenn du in blender arbeit willst, wirst du Kopfschmerzen bekommen, spätestens bei den Bemaßungen, und wegen dem Lehrerprojekt, das mich früher als geplant sich seit letztem Freitag willig Zeit, mich in die ewigen Jagdgründe zu befördern, habe ich keine Zeit für ein Tutorial. Vor allem habe ich eh kein Micro und ohne Micro hab ich da nicht viel zu erzählen im Videoclip egal wie viel ich dir auch gern erklären würde wollen.
Die Gruppierungen fallen alle weg, wenn ich es von blender nach OBJ und STL exportiere denke ich. Das macht die Sache etwas kompliziert, denn in Blender ist eine Gruppe eine Assembly, die man beliebig oft als instanz in der Fräse verwenden kann. In dieser Assembly setze ich auch gleich die Schrauben an die richtige Position, so dass ich alles in einem Stück verschieben kann.
Zur Verdeutlichung, nimm an, du wolltest die Schraubenart ausstauschen, weil Allen-Senk-Schrauben doch besser passen als die momentanen Allen-‚Pan‘-Head-Schrauben (Allen ist Hexbit.). Da gäbe es zwei Möglichkeiten:
Entweder du tauscht jede Schraube einzeln aus.
oder du hast die Schraube vorher einsam in eine Gruppe gepackt. (also die Gruppe umfasst nur die Schraube sonst nichts.) Alle weiteren Schrauben sind dann Instanzen (hier eher: Referenzen) dieser gerade erstellten Gruppe. Jetzt kannst du einfach die alte Schraube aus der Gruppe entfernen und eine neue an deren Stelle reinpacken und überall wird wie durch Magie die Schraube ausgetauscht.
Wir könnten auch eine Gewindestange (bei uns konkret ein paar mal 400 mm + 640 mm Länge) durch stecken und dann zwei Metallstücke je von links und rechts dranschrauben. Wie du schon gesagt hast - vielleicht in Würfel oder T-Slot Form. Kontert sich wegen des gegenläufigen Gewindes auch selbst.
Zuviel Material- und Gewichtsaufwand und überdies nicht notwendig, weil Du, wie oben beschrieben, absolut easy Gewinde in den Kanal schneiden kannst. Ich denke sogar, diese Gewinde and en Enden der Tslots sollten eigentlich ein Standardfeature bei den Baukastenteilen sein, d.h., die sollten alle standardmässig so ein Gewinde aufweisen.
Brilliant! Das wäre wirklich genial. Dann könnte man auch einfach Schrauben reindrehen. Fast wie bei der Iteration 3 XL des MendelMax.
Und , wo wir schon dabei sind, ich würde für die Eckverbindungd desweiteren die L-Stücke aus dem Bausatz verwenden, die haben nämlich ebenfalls eine Diagonale und sind optimal um den Rahmen gegen Scherbwegeungen abzusichern und bombenfest zu machen, soll heissen, eine Kombination aus den L- Verbindern plus diesem vorgenannten Eckstückchen sehe ich als das Mittel der Wahl an.
Abgesehen davon ists, was die Verbindungen betrifft, m.E. auch gar nicht notwendig das so zu machen. Diese kleinen WInkelchen, die Du eingezeichnet hast sind schon das Mittel der Wahl um die Ecken zu stabilisieren, allerdings benötigen die noch eine diagonale Versteifung, da der Metallwinkel ansonsten noch federn könnte.
Tatsächlich und ich dchte, ich hätte die L-Verbinder verwendet! Die kleinste Größe mit einem Loch. Das mit der Querverstrebung ist ein wichtiger Einwand. Ich hatte auch Sorge, dass es federn könnte. Prima. Dann muss ich das Teil austauschen mit den L-Verbindern (die Verbindungstrebe ist vorgesehen? notfalls könnte ich das schnell einzeichnen, oder haben wir das Teil doch schon? Im UniProKit konnte ich keins mit Querbalken wie in deinen Links finden. Prima, dass du schon eine Quelle dafür hast!).
Ich habe ausschließlich Bauteile aus UniProKit verwendet bis auf die Frässpindel-Halterungen und Abstandhalter und Gleitlager und Schrauben.
Ich hätte mal schnell die BoM mit meinem Add-On exportieren sollen ich Depp. Dann hätte man es ja gesehen …
Man könnte im Einzelfall bzw. bei Bedarf noch eins drauf setzen und das wäre in den Tslot ein Loch bohren so dass eine direkte Schrubverbindung möglich wird. Da spricht eigentlich nicht viel gegen und z.B. beim Mendelmax1.5 sind auch die oberen Rahmenstücke mit den schrägen auf diese Weise verbunden, soll heissen,. ich habs schon in der Praxis getestet und es hält wirklich sehr gut. Allerdings würde ich dennoch auch bei einer solchen Verbindung noch mindestens die L-Verbinder ergänzen um zu verhindern, das bei Scherkraftbelastungen des Rahmens die Verbindungslöcher nicht mit der Zeit auslabbern.
Auch eine gute Idee. Das könnte man gut mit dem Gewinde in den T-Slots verbinden.
Naja, und wo zieht der Riemen [der Z-Achse] dran ?
Guter Punkt, ich glaube ich habe die Riemenfixierung der Z-Achse vergessen! Wenn ich es mir recht überlege, wäre das noch ein Grund für die Doppel-T-Slot-Ausführung der Y-Achse, wo wir es eh wegs der momentan ungünstigen einseitigen Belastung durch die Frässpindel/Extruder brauchen.
Als Alternative könnten wir auch einen Schlitz in die Mitte des T-Slots sägen und da den Zahnriemen einhängen bevor man die Slider-Elemente einfädelt. Gut möglich, dass ich deine Slider-Elemente etwas zu universell eingesetzt habe . Aber sollte es funktionieren wäre es vielversprechend. Dann wären deine Slider die Revolution - und dann noch mit Doppelfunktion: Sliding & Fixing.
Die Verbindung Slider und Tslot wird durch den Zug des Riemens auf jedenfall belastet.
Ich schätze an dieser Stelle liegts einfach in der Natur der Sache, dass man nicht Beides gleichzeitig haben kann, ich würde prinzipiell die Slider immer so verwenden, dass sie möglichst horizontal in ihrer Führung ruhen und das Gewicht immer von oben darauf lastet. Und in Fällen wo es zwingend um eine vertikale Bewegung geht, wie z.B. bei der Z-Achse muss die Belastung auf mehrere Slider, also etwa 4 anstatt nur 2 verteilt werden. Denke, damit ist man auf der sicheren Seite.
Glaube auch, dass es belastet wird, zumindest bei der Z-Achse. Das war die einzige Achse, wo die slider nicht so leicht horizontal eingebaut werden konnten. Ich dachte, das Hauptgewicht würde an den zwei Z-Riemen links und rechts hängen, aber vielleicht ist das falsch.
Mir ist noch eingefallen, dass wir u.U. erwägen sollten, auch Seitenplatten anzubringen, so dass nur eine Seite (die obere?) offen bleibt. Ansonsten reicht geringer Wind/Zug schon aus, um die Temperatur zum Schwanken zu bringen und damit zu Fehldrücken zu führen. Dann könnten wir auch ein paar der L-Verbinder bei den T-Slot-Verbindungen einsparen.
Ich glaube, diese Maschine muss ich einfach bauen. Es ist das erste Mal, dass ich glaube, bald richtige Platinen fräsen zu können. Das wäre super für AMOR und die 3D-gedruckten Gehäuse wären ein Wetterschutz für all unsere Controller wie Wilssen oder den PWM-ELC .
Die Slider der Druckplattform könnten in den eben erwähnten zusätzlichen Stützsstreben der Langseite laufen.
Müsste man mal ausprobieren/modellieren, wie viele extra T-Slot-Profile man bräuchte …
Auf den kurzen Seiten des Rahmens würde ich jeweils mittig die Trapezspindel plazieren welche die Druckplatte liftet. Beide Trapezspindeln sollten anders als beim Cartesio einen eigenen Motor haben, damit spart man sich dieses H-Belt Gefrickel.
Meinst du für einen hebbaren Z-Tisch wären zwei Trapezspindeln mit je 1 Schrittmotor ausreichen? Eigentlich ja schon, es sind ja eigentlich nur 40 cm Breite von denen wir sprechen. Die Länge ist 64 cm, die längsten T-Slot-Profile, die wir haben. Heizbetten bräuchten wir also wie der CartesioW zweifach nebeneinander, können wir aber parallel schalten, dann brauchen wir keine extra Elektronik.
Danke für dein Engagement - ohne dich hätten wir es niemals so weit gebracht.
Zusammen räumen wir die letzten Felsbrocken noch aus dem Weg. Und am Ende haben wir sogar zwei Designs, einmal einen hebbaren Heizbett-Tisch und dafür vereinfachte - da statische! - X- und Y-Achsen. Einmal dann das Gegenteil, einen vereinfachten Heizbetttisch - weil statisch - und dafür 2 Riemen + 2 Motoren mehr bei der X- Achse.
Deine fahrbare Heizbett-Z-Achse hat brächte auch eine Entlastung der Sliding-Elemente. Dafür aber mehr T-Slot-Profile. Eins von beiden wird funktionieren. Ich freu mich jetzt schon auf’s Ausprobieren, endlich eine wirklich machbare 3D Fertigungsmaschine ohne den ganzen spezialgefertigten Plastikteilen. (Auch wenn man darüber schimpfen möge, dass das ja gerade gegen das Selbst-Replikator-Prinzip verstößt. Dafür löst es das RepStrap-Problem und dann kann man ja auch immernoch alle Metallteile durch ausgedruckte Plastik-Teile austaschen - und wieder hat man eine selbst-replizierende Maschine. Also doch kein Widerspruch zum RepRap-Prinzip. )
Da gibts glaub ich nicht viel zu mischen da die, soweit ich das bisher rausgehört habe, eh mehr oder weniger identisch sind
Hier mal meine Vorstellung: BeagleBoneBlack oder RaspberryPi auf dem sich die Slic3r > Open Source Alternative CuraEngine > + LinuxEMC befindet. Im 3D-Drucker selbst ein low-cost <10€ uC (AVR, PIC oder ARM) auf dem RODOS läuft, wo dann wiederrum Sprinter> ? > seine Schleifen dreht. (oder jedes beliebige andere 3D-Drucker-Steuer-Programm).
Ja, so oder so ähnlich, wobei man bei der jeweiligen Software schaut, was da gerade aktuell das Beste ist und die bleibig austauschen kann. Im Drucker selbst würde ich zunächst RAMPS + Arduino verwenden um auf der sicheren Seite zu sein und seit das in China in Massen produziert wird sind die Preise stark gefallen, auch wenns noch etwas mehr als 10,- EUR kostet. Aber man kanns ja ggflls. noch anderweitig wiederverwenden, denn mittelfristig würde ich diese Kombination eh gerne durch ein direkt auf das Beaglebone aufgepflanztes Replicape ersetzen, ev. ein selbstgestricktes, wo man Powerlolu-Treiber einstöpseln kann. Aber das hat keine Eile, und am Anfang ists nicht verkehrt auf eine erprobte Kombination zu setzen.
Interessant sind dabei die verschiedenen Möglichkeiten für ein Userinterface:
Direktanbindung von Monitor (HDMI), USB-Keyboard und USB-Maus
Remote-Zugriff via LAN mittels VNC vom normalen Desktop PC aus
Wenn der Drucker eh am Netz hängt, dann kann man auch mit einem billigen Tablet (ich hab hier eins für rund 70,-EUR) via WLAN und mittels einer VNC-App drauf zugreifen. Damit hätte man dann ein sehr cooles Touch-Display, welches direkt in einer Halterung am Drucker befestigt sein könnte oder auch aus dieser entnommen werden und von überallher (entsprechend der WLAN-Reichweite) bedient werden kann. (Das Tablet kann man natürlich auch noch für andere Zwecke nutzen.)
Das brauchst Du auch nicht, wenn ich die Sache erst mal grundsätzlich am laufen hab finde ich mich schon zurecht und sonst frag ich nochmal gezielt nach.
Ich hab jetzt das ganze Wochenende probiert, die Dateien wahlweise in Blender und FreeCad reinzuladen, aber ohne Erfolg.
Wenn ich die .stl-Datei in FreeCad reinlade, dann läd er zwar, aber ich bekomme nix zu sehen und im Objektree an der Seite wird mir angezeigt, dass 0 Punkte und 0 Kanten definiert sind.
Wenn ich die .stl- oder auch die .obj-Datei in Blender reinlade, dann läd er zwar, aber ich bekomme ebenfalls nix zu sehen. Google-Suche ergab, das das mitunter ein Problem mit der Skalierung oder der Positionierung sein könnte, d.h., das das Objekt zwar da ist, aber irgendwo hoch über Dir im Raum schwebt oder sowas. Aber auch dort hab ich nix gefunden
Kannst Du mal bitte verfizieren, ob Du in Blender und FreeCad was siehst wenn Du Deine exportierten Dateien dort reinlädst ? Vielleicht hat das Problem ja auch was mit den von Dir erwähnten Referenzierungen zu tun.
Um zu verfizieren, dass meine Vorgehensweise beim Import grundsätzlich richtig ist, hab ich einfach mal ein Objhekt aus dem Baukasten in FreeCad reingeladen und exportiert und dann die exportierte Datei in Blender eingeladen.
Das funktionierte, allerdings war die Skalierung um etwa Faktor 10 zu groß. Die Skalierung beim Import kann man aber irgendwo in Blender einstellen, ich hab nur noch nicht gefunden wo.
Grundsätzlich muss ich meine Meinung bezüglich des Einsatzes von Blender etwas revidieren, das scheint als Ergänzung zu FreeCad doch recht sinnvoll zu sein, insbesondere beim zusammensetzen der Teile. Das Assembly-Modul in FreeCad ist noch recht neu und hat noch Testing-Status und bei mir zumindest auf Anhieb noch nicht so wie in der Doku beschrieben funktioniert bzw. wird nicht richtig aufgerufen.
Ich denke mal, ein vernünftiger Workflow könnte so aussehen: Erstellen der Einzelteile in FreeCad, dort auch 2D-Ansichten und Bemaßungen dafür erstellen, vielleicht geht das auch mit kleineren Assembly-Gruppen, auch wenn ich noch nicht herausgefunden habe wie. Und dann zusammensetzen des Ganzen in Blender, globale Bemassungen manuell. Sowas in der Art. Ausserdem kann man dann in Blender vermutlich optisch schöne Darstellungen davon rendern lassen.
Die Gruppierungen fallen alle weg, wenn ich es von blender nach OBJ und STL exportiere denke ich. Das macht die Sache etwas kompliziert, denn in Blender ist eine Gruppe eine Assembly, die man beliebig oft als instanz in der Fräse verwenden kann. In dieser Assembly setze ich auch gleich die Schrauben an die richtige Position, so dass ich alles in einem Stück verschieben kann.
Zur Verdeutlichung, nimm an, du wolltest die Schraubenart ausstauschen, …
Ja, schon klar. Ein 3D-Ding kann entweder parametrisch definiert und aus Grafikprimitiven zusammengesetzt (und referenziert) sein, oder als Array von Punkten und Kanten (Mesh). Ersteres macht insbesondere die Dateien schlank und bietet auch mehr Möglichkeiten zur Objektorientierten bzw. parametrischen Manipulation, wie von Dir angesprochen. Ist von daher natürlich wünschenswert.
Vielleicht sollte man hierzu auch mal VRML als Dateiformat testen, das sowohl von Blender als auch FreeCad unterstützt wird. Da VRML ursprünglich zur webbasierten 3D-Darstellung dienen sollte, waren schlanke Dateien (zu Zeiten geringerer Internetbandbreiten als heute) hier natürlich essentiell. Intern verwendet VRML auch das gleiche (objektorientierte) 3D-Grafikmodell wie Inventor. Und ich kenn mich etwas bessre damit aus, weil ich mal ein Buch darüber geschrieben habe http://www.amazon.de/Sprachmerkmale-Anwendungen-Perspektiven-Oliver-Schlüter/dp/3897211211
Zuviel Material- und Gewichtsaufwand und überdies nicht notwendig, weil Du, wie oben beschrieben, absolut easy Gewinde in den Kanal schneiden kannst. Ich denke sogar, diese Gewinde and en Enden der Tslots sollten eigentlich ein Standardfeature bei den Baukastenteilen sein, d.h., die sollten alle standardmässig so ein Gewinde aufweisen.
Brilliant! Das wäre wirklich genial. Dann könnte man auch einfach Schrauben reindrehen. Fast wie bei der Iteration 3 XL des MendelMax.
Der Ix3L ist kein Mendelmax, sondern ein Prusa-Mendel. Von den Prusas halte ich nicht so viel, die sind eher billig und spillerig, daher hatte ich mich lieber für den Mendelmax entschieden, der deutlich stabiler aufgabut ist.
Tatsächlich und ich dchte, ich hätte die L-Verbinder verwendet! Die kleinste Größe mit einem Loch. Das mit der Querverstrebung ist ein wichtiger Einwand. Ich hatte auch Sorge, dass es federn könnte. Prima. Dann muss ich das Teil austauschen mit den L-Verbindern (die Verbindungstrebe ist vorgesehen? notfalls könnte ich das schnell einzeichnen, oder haben wir das Teil doch schon? Im UniProKit konnte ich keins mit Querbalken wie in deinen Links finden. Prima, dass du schon eine Quelle dafür hast!).
Bin nicht sicher ob ich Dich richtig verstehe, aber von diesen Ecken-Stückchen, die bei Motedis angeboten werden gibts noch keine 3D-Datei, die sind bislang auch noch nicht im Bausatz definiert, ich würde die aber noch ergänzen wollen, da dies sinnvoll ist. Und davon eine CAD-Datei zu erstellen ist für mich mal ne schöne FreeCad-Anfängerübung, ich weiss nur noch nicht wann ich dazu komme. Gleiches gilt für das Slider-Element.
Ich habe ausschließlich Bauteile aus UniProKit verwendet bis auf die Frässpindel-Halterungen und Abstandhalter und Gleitlager und Schrauben.
Ich hätte mal schnell die BoM mit meinem Add-On exportieren sollen ich Depp. Dann hätte man es ja gesehen …
Doch, das wurde auch ohne BOM deutlich. Erstellung von BOM brauchen wir erst, wenn das Ding weiter entwickelt ist, im Moment sind da noch zu häufig Änderungen.
Man könnte im Einzelfall bzw. bei Bedarf noch eins drauf setzen und das wäre in den Tslot ein Loch bohren so dass eine direkte Schrubverbindung möglich wird. …
Auch eine gute Idee. Das könnte man gut mit dem Gewinde in den T-Slots verbinden.
Genauso wars gedacht. Ich hatte auch mal überlegt solche Löcher grundsätzlich in den Enden der T-Slots zu haben, hab aber davon abgesehen, weil es zum einen natürlich das Bauteil schwächt und zum anderen nur gelegentlich benötigt wird (und dann auch noch manuell nachgebohrt werden kann) und natürlich auch durch L-Verbinder usw. eine nicht-invasive Alternative besteht, die für die meisten Anwendungsfälle ausreichend sein dürfte.
Naja, und wo zieht der Riemen [der Z-Achse] dran ?
Guter Punkt, ich glaube ich habe die Riemenfixierung der Z-Achse vergessen! Wenn ich es mir recht überlege, wäre das noch ein Grund für die Doppel-T-Slot-Ausführung der Y-Achse, wo wir es eh wegs der momentan ungünstigen einseitigen Belastung durch die Frässpindel/Extruder brauchen.
Als Alternative könnten wir auch einen Schlitz in die Mitte des T-Slots sägen und da den Zahnriemen einhängen bevor man die Slider-Elemente einfädelt. Gut möglich, dass ich deine Slider-Elemente etwas zu universell eingesetzt habe > > . Aber sollte es funktionieren wäre es vielversprechend. Dann wären deine Slider die Revolution - und dann noch mit Doppelfunktion: Sliding & Fixing.
Bin mir nicht sicher ob ich alles richtig verstehe, aber der Riemenfixierung würde ich nicht soone große Bedeutung zumessen, da gibts etliche Lösungen für aus dem 3D-Druckerbereich, von ganz simpel bis hin zu solchen, die ermöglichen, die Spannung einzustellen bzw. nachzujustieren. Das würd ich erstmal komplett aussenvor lassen, kann man sich in einer späteren ENtwicklungsphase nochmal im Detail anschauen.
[/quote]
Mir ist noch eingefallen, dass wir u.U. erwägen sollten, auch Seitenplatten anzubringen, so dass nur eine Seite (die obere?) offen bleibt. Ansonsten reicht geringer Wind/Zug schon aus, um die Temperatur zum Schwanken zu bringen und damit zu Fehldrücken zu führen. Dann könnten wir auch ein paar der L-Verbinder bei den T-Slot-Verbindungen einsparen. [/quote]
Prinzipiell richtig, würde ich aber auch erstmal weiter nach hinten verschieben und anfangs erstmal mit L-Verbindern arbeiten (ich will haltgerne möglichst viel mit dem UniproKit erschlagen). Das Offene ist glaub ich in der Praxis kein großes Problem, das wurde auch in der 3D-DruckerSzene ausgiebig diskutiert und ausführlich gestestet und hat nicht dazu geführt, dass nennenswert viele geschlossene Designs auf der Bildfläche sind. Ich glaub das hat eher einen gewissen Wert um sich einem reinen Endanwender-Konsumenten als eine geschlossene Blackbox mit PlugandPlay-Charakter, also als Produkt, zu präsentieren. Der soll das Ding halt wahrnehmen wie einen 2D-Drucker, bei dem man ja auch nicht das Gestänge sieht.
Ich glaube, diese Maschine muss ich einfach bauen. Es ist das erste Mal, dass ich glaube, bald richtige Platinen fräsen zu können. Das wäre super für AMOR und die 3D-gedruckten Gehäuse wären ein Wetterschutz für all unsere Controller wie Wilssen oder den PWM-ELC > > .
Tja, das Verlangen nach einer Platinenfräse besteht bei mir auch. Aber ich glaube das Platinenfräsen ist nicht ganz so easy wenn man wirklich feine Strukturen hinbekommen möchte. Ein rigider und stabiler Grundaufbau ist dazu aber sicherlich von Vorteil. Wird aber bestimmt noch in etwas Frickelei und Feinarbeit ausarten. Ein vielversprechender Ansatz dazu scheint mir zu sein, vor dem Fräsen der Leiterbahnen die Platine punktrastermässig abzufahren und sich die einzelnen Höhenlevel zu merken und dann beim Fräsen entsprechend zu berücksichtigen.
Einen guten Einblick in diese Thematik fand ich mal bei onshoulders: Mill der Betreiber scheint sich recht ausführlich und systematisch damit befasst zu haben.
Die Slider der Druckplattform könnten in den eben erwähnten zusätzlichen Stützsstreben der Langseite laufen.
Müsste man mal ausprobieren/modellieren, wie viele extra T-Slot-Profile man bräuchte …
Das sind ca. 2m und die kosten ungefähr 6,-EUR mehr, ich denke, da sollte man keine Abstriche machen, das wäre am falschen Ende gespartt.
Auf den kurzen Seiten des Rahmens würde ich jeweils mittig die Trapezspindel plazieren welche die Druckplatte liftet. Beide Trapezspindeln sollten anders als beim Cartesio einen eigenen Motor haben, damit spart man sich dieses H-Belt Gefrickel.
Meinst du für einen hebbaren Z-Tisch wären zwei Trapezspindeln mit je 1 Schrittmotor ausreichen? Eigentlich ja schon, es sind ja eigentlich nur 40 cm Breite von denen wir sprechen. Die Länge ist 64 cm, die längsten T-Slot-Profile, die wir haben. Heizbetten bräuchten wir also wie der CartesioW zweifach nebeneinander, können wir aber parallel schalten, dann brauchen wir keine extra Elektronik.
Für einen 3D-Drucker reichts auf jedenfall, beim Fräsen siehts vielleicht schon etwas anders aus, aber intuitiv würde ich mal annehmen, zumindest beim Platinenfräsen langts auch, denke mal, da kommts mehr auf das Spiel der Führungen an und da sind wir mit 4 Führungen gut dabei.
Danke für dein Engagement - ohne dich hätten wir es niemals so weit gebracht.
Zusammen räumen wir die letzten Felsbrocken noch aus dem Weg.
Dito, allerdings sehe ich uns eher noch am Anfang des Designs als am Ende Aber es ist schonmal gut, wenn sich überhaupt was tut.
Und am Ende haben wir sogar zwei Designs, einmal einen hebbaren Heizbett-Tisch und dafür vereinfachte - da statische! - X- und Y-Achsen. Einmal dann das Gegenteil, einen vereinfachten Heizbetttisch - weil statisch - und dafür 2 Riemen + 2 Motoren mehr bei der X- Achse.
Ja, es spricht, besonders am Anfang nix dagegen, verschiedene Ansätze für Prototypen parallel zu verfolgen. Im günstigsten Fall würde aus meiner Sicht ein modulares System entstehen, etwa ein universeller Grundrahmen, den man dann, je nach Anwendungszweck, mit unterschiedlichen Modulen bestücken und anpassen kann. So das man am Ende wirklich zumindest konzeptionell eine Art Multi-Maschine hätte. Ich denke im Moment auch stark darüber nach, einen Zweig der Entwicklung in Richtung Bohrautomat zur Herstellung der UniProKit-Bauteile laufen zu lassen, da hab ich nämlich noch einen großen Bedarf. Ich hatte da zunächst einen etwas anderen Ansatz verfolgt, aber eigentlich bietet es sich fast an, oder sagen wir mal, es reizt mich zu versuchen ob es mit diesem Ansatz auch geht.
Deine fahrbare Heizbett-Z-Achse hat brächte auch eine Entlastung der Sliding-Elemente. Dafür aber mehr T-Slot-Profile. Eins von beiden wird funktionieren. Ich freu mich jetzt schon auf’s Ausprobieren, endlich eine wirklich machbare 3D Fertigungsmaschine ohne den ganzen spezialgefertigten Plastikteilen. (Auch wenn man darüber schimpfen möge, dass das ja gerade gegen das Selbst-Replikator-Prinzip verstößt. Dafür löst es das RepStrap-Problem und dann kann man ja auch immernoch alle Metallteile durch ausgedruckte Plastik-Teile austaschen - und wieder hat man eine selbst-replizierende Maschine. Also doch kein Widerspruch zum RepRap-Prinzip. > > )
Ja, und davon abgesehen würde ich das Selbstreplikations-Prinzip auch nicht überbewerten, das ist eine nette Ideologie die sich insbesondere zu Promotion-Zwecke gut macht, aber wenn ich die Wahl zwischen einem stabilen und einem schlabberigen Gerät habe, dann nehme ich das stabile. Abgesehen davon ist jede Fräse, mit der Du Dir Teile für eine weitere Fräse herstellen kannst ebenfalls selbstreplizierend. Oder noch besser, das UniproKit. Damit kannst Du Dir eine Maschine bauen um weitere Kit-Bauteile herzustellen (zumindest ist das mein Plan ) Und Du kannst es umbauen in eine Maschine die andere Bauteile herstellen kann, die bislang noch gar nicht im Kit definiert sind, aber dieses erweitern würden. Und je mehr verschiedenartige Maschinen Du baust umso größer wird die Bandbreite an möglichen weiteren Arten von Bauteilen und damit die Bandbreite an weiteren möglichen Maschinen, usw. das lässt sich endlos fortsetzen Also wäre das Uniprokit auch selbstreplizierend, zumindest sobald man damit den ersten Bohrautomat gebaut hat.
Das brauchst Du auch nicht, wenn ich die Sache erst mal grundsätzlich am laufen hab finde ich mich schon zurecht und sonst frag ich nochmal gezielt nach.
Ich hab jetzt das ganze Wochenende probiert, die Dateien wahlweise in Blender und FreeCad reinzuladen, aber ohne Erfolg.
Wenn ich die .stl-Datei in FreeCad reinlade, dann läd er zwar, aber ich bekomme nix zu sehen und im Objektree an der Seite wird mir angezeigt, dass 0 Punkte und 0 Kanten definiert sind.
Wenn ich die .stl- oder auch die .obj-Datei in Blender reinlade, dann läd er zwar, aber ich bekomme ebenfalls nix zu sehen. Google-Suche ergab, das das mitunter ein Problem mit der Skalierung oder der Positionierung sein könnte, d.h., das das Objekt zwar da ist, aber irgendwo hoch über Dir im Raum schwebt oder sowas. Aber auch dort hab ich nix gefunden
Kannst Du mal bitte verfizieren, ob Du in Blender und FreeCad was siehst wenn Du Deine exportierten Dateien dort reinlädst ? Vielleicht hat das Problem ja auch was mit den von Dir erwähnten Referenzierungen zu tun.
Um zu verfizieren, dass meine Vorgehensweise beim Import grundsätzlich richtig ist, hab ich einfach mal ein Objhekt aus dem Baukasten in FreeCad reingeladen und exportiert und dann die exportierte Datei in Blender eingeladen.
Das funktionierte, allerdings war die Skalierung um etwa Faktor 10 zu groß. Die Skalierung beim Import kann man aber irgendwo in Blender einstellen, ich hab nur noch nicht gefunden wo.
Grundsätzlich muss ich meine Meinung bezüglich des Einsatzes von Blender etwas revidieren, das scheint als Ergänzung zu FreeCad doch recht sinnvoll zu sein, insbesondere beim zusammensetzen der Teile. Das Assembly-Modul in FreeCad ist noch recht neu und hat noch Testing-Status und bei mir zumindest auf Anhieb noch nicht so wie in der Doku beschrieben funktioniert bzw. wird nicht richtig aufgerufen.
Ich denke mal, ein vernünftiger Workflow könnte so aussehen: Erstellen der Einzelteile in FreeCad, dort auch 2D-Ansichten und Bemaßungen dafür erstellen, vielleicht geht das auch mit kleineren Assembly-Gruppen, auch wenn ich noch nicht herausgefunden habe wie. Und dann zusammensetzen des Ganzen in Blender, globale Bemassungen manuell. Sowas in der Art. Ausserdem kann man dann in Blender vermutlich optisch schöne Darstellungen davon rendern lassen.
Die Gruppierungen fallen alle weg, wenn ich es von blender nach OBJ und STL exportiere denke ich. Das macht die Sache etwas kompliziert, denn in Blender ist eine Gruppe eine Assembly, die man beliebig oft als instanz in der Fräse verwenden kann. In dieser Assembly setze ich auch gleich die Schrauben an die richtige Position, so dass ich alles in einem Stück verschieben kann.
Zur Verdeutlichung, nimm an, du wolltest die Schraubenart ausstauschen, …
Ja, schon klar. Ein 3D-Ding kann entweder parametrisch definiert und aus Grafikprimitiven zusammengesetzt (und referenziert) sein, oder als Array von Punkten und Kanten (Mesh). Ersteres macht insbesondere die Dateien schlank und bietet auch mehr Möglichkeiten zur Objektorientierten bzw. parametrischen Manipulation, wie von Dir angesprochen. Ist von daher natürlich wünschenswert.
Vielleicht sollte man hierzu auch mal VRML als Dateiformat testen, das sowohl von Blender als auch FreeCad unterstützt wird. Da VRML ursprünglich zur webbasierten 3D-Darstellung dienen sollte, waren schlanke Dateien (zu Zeiten geringerer Internetbandbreiten als heute) hier natürlich essentiell. Intern verwendet VRML auch das gleiche (objektorientierte) 3D-Grafikmodell wie Inventor. Und ich kenn mich etwas bessre damit aus, weil ich mal ein Buch darüber geschrieben habe http://www.amazon.de/Sprachmerkmale-Anwendungen-Perspektiven-Oliver-Schlüter/dp/3897211211
Zuviel Material- und Gewichtsaufwand und überdies nicht notwendig, weil Du, wie oben beschrieben, absolut easy Gewinde in den Kanal schneiden kannst. Ich denke sogar, diese Gewinde and en Enden der Tslots sollten eigentlich ein Standardfeature bei den Baukastenteilen sein, d.h., die sollten alle standardmässig so ein Gewinde aufweisen.
Brilliant! Das wäre wirklich genial. Dann könnte man auch einfach Schrauben reindrehen. Fast wie bei der > Iteration 3 XL des MendelMax> .
Der Ix3L ist kein Mendelmax, sondern ein Prusa-Mendel. Von den Prusas halte ich nicht so viel, die sind eher billig und spillerig, daher hatte ich mich lieber für den Mendelmax entschieden, der deutlich stabiler aufgebaut ist.
Tatsächlich und ich dchte, ich hätte die L-Verbinder verwendet! Die kleinste Größe mit einem Loch. Das mit der Querverstrebung ist ein wichtiger Einwand. Ich hatte auch Sorge, dass es federn könnte. Prima. Dann muss ich das Teil austauschen mit den L-Verbindern (die Verbindungstrebe ist vorgesehen? notfalls könnte ich das schnell einzeichnen, oder haben wir das Teil doch schon? Im UniProKit konnte ich keins mit Querbalken wie in deinen Links finden. Prima, dass du schon eine Quelle dafür hast!).
Bin nicht sicher ob ich Dich richtig verstehe, aber von diesen Ecken-Stückchen, die bei Motedis angeboten werden gibts noch keine 3D-Datei, die sind bislang auch noch nicht im Bausatz definiert, ich würde die aber noch ergänzen wollen, da dies sinnvoll ist. Und davon eine CAD-Datei zu erstellen ist für mich mal ne schöne FreeCad-Anfängerübung, ich weiss nur noch nicht wann ich dazu komme. Gleiches gilt für das Slider-Element.
Ich habe ausschließlich Bauteile aus UniProKit verwendet bis auf die Frässpindel-Halterungen und Abstandhalter und Gleitlager und Schrauben.
Ich hätte mal schnell die BoM mit meinem Add-On exportieren sollen ich Depp. Dann hätte man es ja gesehen …
Doch, das wurde auch ohne BOM deutlich. Erstellung von BOM brauchen wir erst, wenn das Ding weiter entwickelt ist, im Moment sind da noch zu häufig Änderungen.
Man könnte im Einzelfall bzw. bei Bedarf noch eins drauf setzen und das wäre in den Tslot ein Loch bohren so dass eine direkte Schrubverbindung möglich wird. …
Auch eine gute Idee. Das könnte man gut mit dem Gewinde in den T-Slots verbinden.
Genauso wars gedacht. Ich hatte auch mal überlegt solche Löcher grundsätzlich in den Enden der T-Slots zu haben, hab aber davon abgesehen, weil es zum einen natürlich das Bauteil schwächt und zum anderen nur gelegentlich benötigt wird (und dann auch noch manuell nachgebohrt werden kann) und natürlich auch durch L-Verbinder usw. eine nicht-invasive Alternative besteht, die für die meisten Anwendungsfälle ausreichend sein dürfte.
Naja, und wo zieht der Riemen [der Z-Achse] dran ?
Guter Punkt, ich glaube ich habe die Riemenfixierung der Z-Achse vergessen! Wenn ich es mir recht überlege, wäre das noch ein Grund für die Doppel-T-Slot-Ausführung der Y-Achse, wo wir es eh wegs der momentan ungünstigen einseitigen Belastung durch die Frässpindel/Extruder brauchen.
Als Alternative könnten wir auch einen Schlitz in die Mitte des T-Slots sägen und da den Zahnriemen einhängen bevor man die Slider-Elemente einfädelt. Gut möglich, dass ich deine Slider-Elemente etwas zu universell eingesetzt habe > > . Aber sollte es funktionieren wäre es vielversprechend. Dann wären deine Slider die Revolution - und dann noch mit Doppelfunktion: Sliding & Fixing.
Bin mir nicht sicher ob ich alles richtig verstehe, aber der Riemenfixierung würde ich nicht soone große Bedeutung zumessen, da gibts etliche Lösungen für aus dem 3D-Druckerbereich, von ganz simpel bis hin zu solchen, die ermöglichen, die Spannung einzustellen bzw. nachzujustieren. Das würd ich erstmal komplett aussenvor lassen, kann man sich in einer späteren Entwicklungsphase nochmal im Detail anschauen.
Mir ist noch eingefallen, dass wir u.U. erwägen sollten, auch Seitenplatten anzubringen, so dass nur eine Seite (die obere?) offen bleibt. Ansonsten reicht geringer Wind/Zug schon aus, um die Temperatur zum Schwanken zu bringen und damit zu Fehldrücken zu führen. Dann könnten wir auch ein paar der L-Verbinder bei den T-Slot-Verbindungen einsparen.
Prinzipiell richtig, würde ich aber auch erstmal weiter nach hinten verschieben und anfangs erstmal mit L-Verbindern arbeiten (ich will haltgerne möglichst viel mit dem UniproKit erschlagen). Das Offene ist glaub ich in der Praxis kein großes Problem, das wurde auch in der 3D-DruckerSzene ausgiebig diskutiert und ausführlich gestestet und hat nicht dazu geführt, dass nennenswert viele geschlossene Designs auf der Bildfläche sind. Ich glaub das hat eher einen gewissen Wert um sich einem reinen Endanwender-Konsumenten als eine geschlossene Blackbox mit PlugandPlay-Charakter, also als Produkt, zu präsentieren. Der soll das Ding halt wahrnehmen wie einen 2D-Drucker, bei dem man ja auch nicht das Gestänge sieht.
Ich glaube, diese Maschine muss ich einfach bauen. Es ist das erste Mal, dass ich glaube, bald richtige Platinen fräsen zu können. Das wäre super für AMOR und die 3D-gedruckten Gehäuse wären ein Wetterschutz für all unsere Controller wie Wilssen oder den PWM-ELC > > .
Tja, das Verlangen nach einer Platinenfräse besteht bei mir auch. Aber ich glaube das Platinenfräsen ist nicht ganz so easy wenn man wirklich feine Strukturen hinbekommen möchte. Ein rigider und stabiler Grundaufbau ist dazu aber sicherlich von Vorteil. Wird aber bestimmt noch in etwas Frickelei und Feinarbeit ausarten. Ein vielversprechender Ansatz dazu scheint mir zu sein, vor dem Fräsen der Leiterbahnen die Platine punktrastermässig abzufahren und sich die einzelnen Höhenlevel zu merken und dann beim Fräsen entsprechend zu berücksichtigen.
Einen guten Einblick in diese Thematik fand ich mal bei onshoulders: Mill der Betreiber scheint sich recht ausführlich und systematisch damit befasst zu haben.
Die Slider der Druckplattform könnten in den eben erwähnten zusätzlichen Stützsstreben der Langseite laufen.
Müsste man mal ausprobieren/modellieren, wie viele extra T-Slot-Profile man bräuchte …
Das sind ca. 2m und die kosten ungefähr 6,-EUR mehr, ich denke, da sollte man keine Abstriche machen, das wäre am falschen Ende gespartt.
Auf den kurzen Seiten des Rahmens würde ich jeweils mittig die Trapezspindel plazieren welche die Druckplatte liftet. Beide Trapezspindeln sollten anders als beim Cartesio einen eigenen Motor haben, damit spart man sich dieses H-Belt Gefrickel.
Meinst du für einen hebbaren Z-Tisch wären zwei Trapezspindeln mit je 1 Schrittmotor ausreichen? Eigentlich ja schon, es sind ja eigentlich nur 40 cm Breite von denen wir sprechen. Die Länge ist 64 cm, die längsten T-Slot-Profile, die wir haben. Heizbetten bräuchten wir also wie der CartesioW zweifach nebeneinander, können wir aber parallel schalten, dann brauchen wir keine extra Elektronik.
Für einen 3D-Drucker reichts auf jedenfall, beim Fräsen siehts vielleicht schon etwas anders aus, aber intuitiv würde ich mal annehmen, zumindest beim Platinenfräsen langts auch, denke mal, da kommts mehr auf das Spiel der Führungen an und da sind wir mit 4 Führungen gut dabei.
Danke für dein Engagement - ohne dich hätten wir es niemals so weit gebracht.
Zusammen räumen wir die letzten Felsbrocken noch aus dem Weg.
Dito, allerdings sehe ich uns eher noch am Anfang des Designs als am Ende Aber es ist schonmal gut, wenn sich überhaupt was tut.
Und am Ende haben wir sogar zwei Designs, einmal einen hebbaren Heizbett-Tisch und dafür vereinfachte - da statische! - X- und Y-Achsen. Einmal dann das Gegenteil, einen vereinfachten Heizbetttisch - weil statisch - und dafür 2 Riemen + 2 Motoren mehr bei der X- Achse.
Ja, es spricht, besonders am Anfang nix dagegen, verschiedene Ansätze für Prototypen parallel zu verfolgen. Im günstigsten Fall würde aus meiner Sicht ein modulares System entstehen, etwa ein universeller Grundrahmen, den man dann, je nach Anwendungszweck, mit unterschiedlichen Modulen bestücken und anpassen kann. So das man am Ende wirklich zumindest konzeptionell eine Art Multi-Maschine hätte. Ich denke im Moment auch stark darüber nach, einen Zweig der Entwicklung in Richtung Bohrautomat zur Herstellung der UniProKit-Bauteile laufen zu lassen, da hab ich nämlich noch einen großen Bedarf. Ich hatte da zunächst einen etwas anderen Ansatz verfolgt, aber eigentlich bietet es sich fast an, oder sagen wir mal, es reizt mich zu versuchen ob es mit diesem Ansatz auch geht.
Deine fahrbare Heizbett-Z-Achse hat brächte auch eine Entlastung der Sliding-Elemente. Dafür aber mehr T-Slot-Profile. Eins von beiden wird funktionieren. Ich freu mich jetzt schon auf’s Ausprobieren, endlich eine wirklich machbare 3D Fertigungsmaschine ohne den ganzen spezialgefertigten Plastikteilen. (Auch wenn man darüber schimpfen möge, dass das ja gerade gegen das Selbst-Replikator-Prinzip verstößt. Dafür löst es das RepStrap-Problem und dann kann man ja auch immernoch alle Metallteile durch ausgedruckte Plastik-Teile austaschen - und wieder hat man eine selbst-replizierende Maschine. Also doch kein Widerspruch zum RepRap-Prinzip. > > )
Ja, und davon abgesehen würde ich das Selbstreplikations-Prinzip auch nicht überbewerten, das ist eine nette Ideologie die sich insbesondere zu Promotion-Zwecke gut macht, aber wenn ich die Wahl zwischen einem stabilen und einem schlabberigen Gerät habe, dann nehme ich das stabile. Abgesehen davon ist jede Fräse, mit der Du Dir Teile für eine weitere Fräse herstellen kannst ebenfalls selbstreplizierend. Oder noch besser, das UniproKit. Damit kannst Du Dir eine Maschine bauen um weitere Kit-Bauteile herzustellen (zumindest ist das mein Plan ) Und Du kannst es umbauen in eine Maschine die andere Bauteile herstellen kann, die bislang noch gar nicht im Kit definiert sind, aber dieses erweitern würden. Und je mehr verschiedenartige Maschinen Du baust umso größer wird die Bandbreite an möglichen weiteren Arten von Bauteilen und damit die Bandbreite an weiteren möglichen Maschinen, usw. das lässt sich endlos fortsetzen Also wäre das Uniprokit auch selbstreplizierend, zumindest sobald man damit den ersten Bohrautomat gebaut hat.
Um Himmels Willen, hätte ich doch nur gleich meine 3D-.blend-Datei hochgeladen. Was für eine Zeitverschwendung für dich, da mit dem Export rumfuhrwerken zu müssen, das tut mir Leid! (im Anhang eine Zip-Datei mit kit.blend und Ordner Project_PlaDruMas/ sowie der dortigen .blend-Datei) Aber ich schaue trotzdem mal schnell, ob ich es in FreeCAD importieren kann.
Habe auch schonmal schnell die L-Verbinder eingebaut.
Dein Elektronik-Vorschlag ist super. Da hat man alle Möglichkeiten, vor allem die Methode mit dem abnehmbaren Display/Tablet finde ich prima. Da spart man sich wieder etwas. Hab auch schon im Wiki auf dein Konstruktionsbeispiel im Elektronik-Erweiterungs-Set verlinkt.
Also Blender Crashkurs:
Rechtsklick auf ein Objekt, wählt es aus. (man muss sich erstmal daran gewöhnen, dass man mit RECHTS auswählt, nichts mit Linksklick.)
Verschieben: Taste G (danach einfach Zahlen tippen oder eine Rechnung, z.B. 10 + 20 geht genauso, blender verschiebt das Objekt dann um 30 Einheiten und gibt dir auch eine Vorschau). Vorgang abschließen mit Linksklick oder ENTER. Abbrechen mit Rechtsklick oder ESC.
Rotation: R (dann Z drücken, wenn du das Objekt nur um die Z-Achse drehen willst. Oder X wenn nur um X, usw. Mit SHIFT+Z kann man z.B. die Z-Achse sperren, nützlich beim Verschieben (Taste G für Grab), wenn man alles bloß nicht die Z-Koordinaten ändern will.)
Skalieren: S (es ist wichtig zu wissen, dass man sowohl relativ zur Position des 3D-Cursors als auch zum Objekt skalieren kann). Skalieren braucht man momentan nie, da wir ja nur Teile aus deinem UniProKit verwenden.
Objekt hinzufügen: SHIFT + A (ULTRA WICHTIG: Group Instance ganz unten in dem PopUp, das sich dann öffnet. Das PopUp geht weg, wenn die Maus ausserhalb des PopUps aktiv wird oder indem man eine Option wählt.)
Suchen: Leertaste (ALLHEILMITTEL)
Folgende Struktur innerhalb des blender-Datei habe ich verwendet:
HOG_3D_PlaDruMas.blend hat Objekte aus kit.blend gelinkt (d.h. per Referenz eingebunden). d.h. kit.blend muss immer im Elternordner relativ zum Projektordner PlaDruMas stehen.
Jedem eingebundenen Objekt habe ich eine Gruppe zugeordnet. Damit kann man das Objekt über SHIFT+A → Group instance … hinzufügen. Der Vorteil von Gruppeninstanz (lies: Assembly) gegenüber Referenzduplizieren (ALT+D) ist, dass man das zugrundeliegende Mesh (z.B. eine Schraubenart) ganz einfach austauschen kann, indem man einfach eine anderes Objekt in die Gruppe packt und die alte Schraube aus der Gruppe entfernt.
Auf Ebene 2 befindet sich das Endergebnis. (Über Taste 2 kann man dorthin springen).
Auf den Ebenen 6…10 befinden sich die Assemblies.
Auf Ebenen 16…20 befinden sich wild gemixt Helferobjekte.
Auf Ebenen 11…15 sind alle gelinkten Objekte von kit.blend zu finden. Ebenso habe ich da die Riemen konstruiert. Will man eine Riemengröße ändern, muss man dort auf Ebene 14 die BezierCurve suchen! Das Mesh des Riemens passt sich über einen sogenannten ‚Modifier‘ (zugänglich ganz rechts in blender über den Reiter mit dem Werkzeugschlüssel-Symbol, wenn man das Objekt ausgewählt hat).
Zwischen Mesh und Objekt-Modus kann man mittels der TABulator-Taste umschalten. Brauchen wir hier erstmal nicht, außer man will Objekte erstellen oder Bemaßungen automatisieren.
Es ist nicht ganz einfach sich in dem blender-Projekt zurecht zu finden. Man muss zur Positionierung nach dem Drücken von G oft die STRG-Taste gedrückt halten, um das Objekt in Rasterschritten zu bewegen (also finit, im Gegensatz zu infinit kleinen Schritten). Man kann auch mittels STRG+SHIFT/UMSCHALT+TABULATOR umschalten zwischen Vertex-Snap, Kanten-Snap, Oberflächen-Snap … oder eben der Standard-Einstellung: In Grid/Rasterschritten. (aktiviert durch Drücken der STRG-Taste während einer beliebigen Operation).
Ich teste schnell mit FreeCAD. Dann lade ch eine funktionierende Version hoch. (und gehe auf die überbliebenen Punkte ein) Ergebnis: Weil ich in Blender mit Gruppenreferenzen (Assemblies) arbeite, werden immer nur emtpies, also leere Objekte, exportiert! Habe die ganzen Referenzen jetzt aufgelöst mittels A (Alles auswählen) + Leertaste + „Make Duplicates Real“ und Taste U (make object and object data (also die Knoten und Kanten) single users). Jetzt landet das Objekt immerhin in FreeCAD, aber ich komme da noch nicht klar. Mir ist selbst ein Rätsel wie man da die 3D-Ansicht schrittchenweise dreht. In blender geht es mit der mittleren Maustaste oder mit den Numpad-Tasten 2, 4, 6, 8. Mit Numpad , (Komma) kann man den Dreh- und Angelpunkt (Pivot) zum momentan ausgewählten Objekt setzen. Dann kann man sich um das Objekt herumdrehen. Schön praktisch.
Mit FreeCAD muss ich erstmal noch Tutorials durcharbeiten. Also im Anhang meine .blend-Dateistruktur. Duplizieren von Objekten (egal ob Gruppeninstanz also Assembly oder nicht) geht mittels SHIFT+D. Referenz-Kopien von Objekten (d.h. Änderungen werden gespiegelt) mittels ALT+D. Achtung, ALT+D hat bei Gruppeninstanzen den selben Effekt wie SHIFT+D. (weil es eh schon Referenzen sind) Gruppeninstanzen sind effektiv in Blender empties. An dessen Stelle werden dann die Objekte der Gruppe angezeigt.
Wenn mal eine Gruppe nicht da landet wo man sie eingefügt hat, einfach STRG+ALT+SHIFT+C und „Geometry to Origin“ wählen. Das ist immer der Fall, wenn das Assembly auf Ebenen 6…10 nicht im globalen Nullpunkt liegt (mit SHIFT+C springt die 3D-Ansicht zu diesem Zentrumspunkt und fokussiert auf alle Objekte, die sichtbar sind).
Mit H kann man Objekte verstecken (hide), sollten mal die Sicht versperrt sein. Mit ALT+H tauchen all diese versteckten Objekte wieder auf.
Mehrere Objekte auswählen mittels gedrückthalten von SHIFT und Rechtsklick. Abwählen auch mit SHIFT+Rechtsklick, da muss man manchmal zweimal für drücken. Empfehlenswert hier ist die Drahtgitteransicht: umschaltbar mittels Taste Z im Objekt-Modus (notfalls mit Tabulator von Editier-Modus nach Objekt-Modus umschalten). Funktioniert nur, wenn man nicht gerade eine Verschiebe- oder Rotations- oder sonstige Operation gestartet hat.
Alle Operationen kann man mit RECHTSKLICK abbrechen. Mit Linksklick oder Taste ENTER beendet man die Operation. Also für eine Rotation um 90° um Achse Z tippt man:
Objekt auswählen mit Rechtsklick oder alle mittels Taste A.
R
Z
90
notfals * -1 eintippen, um die Rotationsrichtung umzukehren. HOG3D_blend.zip (22.3 MB)
Ja, und davon abgesehen würde ich das Selbstreplikations-Prinzip auch nicht überbewerten, das ist eine nette Ideologie die sich insbesondere zu Promotion-Zwecke gut macht, aber wenn ich die Wahl zwischen einem stabilen und einem schlabberigen Gerät habe, dann nehme ich das stabile. Abgesehen davon ist jede Fräse, mit der Du Dir Teile für eine weitere Fräse herstellen kannst ebenfalls selbstreplizierend. Oder noch besser, das UniproKit. Damit kannst Du Dir eine Maschine bauen um weitere Kit-Bauteile herzustellen (zumindest ist das mein Plan > > ) Und Du kannst es umbauen in eine Maschine die andere Bauteile herstellen kann, die bislang noch gar nicht im Kit definiert sind, aber dieses erweitern würden. Und je mehr verschiedenartige Maschinen Du baust umso größer wird die Bandbreite an möglichen weiteren Arten von Bauteilen und damit die Bandbreite an weiteren möglichen Maschinen, usw. das lässt sich endlos fortsetzen > > Also wäre das Uniprokit auch selbstreplizierend, zumindest sobald man damit den ersten Bohrautomat gebaut hat.
Das funktionierte, allerdings war die Skalierung um etwa Faktor 10 zu groß. Die Skalierung beim Import kann man aber irgendwo in Blender einstellen, ich hab nur noch nicht gefunden wo.
Wenn nicht unten links beim Importvorgang, dann weiß ich gerade auch nicht weiter. (Man kann es aber auch im nachhinein mittels Skalieren ändern. Danach am besten die Skalierung übernehmen (STRG+A +Location auswählen). Sonst wird die Größe des Objekts beim Export z.B. mittels meines BOM-Addons falsch ausgerechnet. Grundsätzlich sollte man bei blender immer die Skalierung auf x,y,z = 1,1,1 halten, außer es ist wirklich eine andere Größe gewünscht. Wenn das aber die Elementargröße /Standardgröße ist, sollte der Skalierwert 1.0 anzeigen. Also entweder im Edit-Mode (1x TAB-Taste, wenn im Objekt-Modus) skalieren oder die Skalierfaktoren normalisieren (STRG+A+Location)).
Die Ursache des Problems liegt an den verschiedenen Default-Einheiten in den verschiedenen Programmen (hier: SketchUp & Blender). Kann man in Blender rechts im Properties-Panel im Welt-Reiter, also über das Erdensymbol, bei Einheiten „Metric“ und dann die Skalierung einstellen. Will man hochgenau arbeiten, sollte man den Skalierfaktor auf 1 oder 0.1 oder höher belassen. Dann kann man immer näher hinzoomen und das Raster/Grid kleiner auflösen und damit feiner verschieben mit Raster-Snapping (Umschalten zu Rastersnapping: STRG+SHIFT+TAB – zur Aktivierung STRG gedrückt halten während einer Operation). Manchmal muss man daher zwecks der Genauigkeit bei der Positionierung von Knoten oder Objekten die Skalierung der Einheiten anpassen. (bis zum Exportieren der Herstellungsdateien ist der Wert auch uniteressant, solange man konsistent arbeitet und beim Eintippen der Werte in verschiedenen Einheiten nicht durcheinander kommt. Blender versteht zum Glück auch Einheiten, also kann man auch um für Micrometer oder cm für Zentimeter eintippen.)
Grundsätzlich muss ich meine Meinung bezüglich des Einsatzes von Blender etwas revidieren, das scheint als Ergänzung zu FreeCad doch recht sinnvoll zu sein, insbesondere beim zusammensetzen der Teile. Das Assembly-Modul in FreeCad ist noch recht neu und hat noch Testing-Status und bei mir zumindest auf Anhieb noch nicht so wie in der Doku beschrieben funktioniert bzw. wird nicht richtig aufgerufen.
Ich denke mal, ein vernünftiger Workflow könnte so aussehen: Erstellen der Einzelteile in FreeCad, dort auch 2D-Ansichten und Bemaßungen dafür erstellen, vielleicht geht das auch mit kleineren Assembly-Gruppen, auch wenn ich noch nicht herausgefunden habe wie. Und dann zusammensetzen des Ganzen in Blender, globale Bemassungen manuell. Sowas in der Art. Ausserdem kann man dann in Blender vermutlich optisch schöne Darstellungen davon rendern lassen.
Ich weiß es nicht. Für mich sind sowohl Blender als auch FreeCAD ein zweischneidiges Schwert. Einerseits macht Yorik & Konsorten mit FreeCAD Wahnsinnsprojekte, andererseits liegt mir Blenders Workflow eher, wenn auch Blender schwierig zu lernen sein mag … aber mit den hochklassigen Tutorials von z.B. blenderguru oder cgcookie blender ist das wirklich nur eine Frage der Zeit, bis man selbst versuchen kann, IceAge zu verfilmen.
Die Herangehensweise von FreeCAD ist natürlich für Ingenieurskunst wohl um einiges besser geeignet. Aber mit meinem Gruppen-Umweg und meine ausstehenden Automatisierungs-Addons für Bemaßungen und Export von 2D-Ansichten sollte das in Zukunft auch lösbar sein. FreeCAD benutzt für FiniteElementAnalysis ja auch ein fremdes/externes Programm (Z88 oder Calculix, beides von deutschen Unis und Open source). Mich hätte gefreut, wenn sie ohnezweifel gelungenen Features von FreeCAD für blender als Python-Module geschrieben hätten. Aber da ist Blender nicht ganz unschuldig, denn neuerdings ist es schwierig, eine richtige CAD-interaktion per Python einzubauen, weil sie die Schnittstellen entfernt habem. Das hat Remigiusz, ein Berliner Architekt, mir mal erzählt als wir über seine meisterhaften CADTools sprachen.
Ob FreeCAD oder Blender, irgendwie kriegen wir’s schon gebacken. Beides benötigt Einarbeitungszeit. Beides ist mächtig, beides kann man kombinieren. Aber für den Export von Herstellungsdateien ist FreeCAD genauer, da pur parametrisch. Cool in blender ist, dass eine Physik-Engine (Bullet & Springhead) intergriert ist. D.h. man könnte die Maschine gleich simulieren, Zahnräder und was man sich noch so alles vorstellen kann. An parametrischer Modellierung wird derzeit gearbeitet. Ich mag beide Tools, aber mich lehrt die unbeherrschbare Redundanz der Open-Source-Welt das fürchten. Warum fusionieren nicht endlich LibreCAD und FreeCAD … Linus Thorvald oder David Freeman werden sich da wahrscheinlich einschalten müssen, um den Lizenzkrieg zu beenden. Wir brauchen endlich das Welt-Repository, wo alle OpenSource Entwicklungen kataalogisiert sind. Deine Linkliste letztens war da schon ein super Anfang!
Ja, danke, jetzt krieg ich alles geladen freu. Und no prob, beim rumsuchen kriegt man schon mal das eine oder andere für später mit
Ich muss mir unbedingt ne schnellere Grafikkarte besorgen, ich hab da im Moment ein Uralt-Teil drin. Aber zur Not gehts schon mal.
Also Blender Crashkurs:
…
Danke für den Crashkurs, muss ich gleich mal in Ruhe drucharbeiten, aber auf die schnelle scheinen da viele gute Tips drin zu sein. Du solltest den unbedingt auch ins Wiki stellen, dakann man vielleicht mit der Zeit noch den einen oder anderen Tip ergänzen.
Auf Ebenen 16…20 befinden sich wild gemixt Helferobjekte.
Ja, interessant was da noch so alles drin rumschwirrt
Aber Deine Beschreibung des Objektaufbaus ist ebenfalls sehr aufschlussreich.
Auf Ebenen 11…15 sind alle gelinkten Objekte von kit.blend zu finden. Ebenso habe ich da die Riemen konstruiert. Will man eine Riemengröße ändern, muss man dort auf Ebene 14 die BezierCurve suchen! Das Mesh des Riemens passt sich über einen sogenannten ‚Modifier‘ (zugänglich ganz rechts in blender über den Reiter mit dem Werkzeugschlüssel-Symbol, wenn man das Objekt ausgewählt hat).
Ah, sehr cool, hab mich schon gefragt wie Du das wohl gemacht hast. Na, das sind wohl schon die höheren Blender-Weihen, ich meinerseits bin schon froh, wenn ich erstmal dazu imstande bin, ein Objekt exakt an eine Stelle zu positionieren, wo ichs hinhaben will … und bis dahin ists noch ein weiter Weg wie mir scheint Aber immerhin, man ist auf dem Weg.
Ich teste schnell mit FreeCAD. Dann lade ch eine funktionierende Version hoch. (und gehe auf die überbliebenen Punkte ein) Ergebnis: > Weil ich in Blender mit Gruppenreferenzen (Assemblies) arbeite, werden immer nur emtpies, also leere Objekte, exportiert!
Ja, genau das war auch meine Vermutung.
Mit FreeCAD muss ich erstmal noch Tutorials durcharbeiten.
Würd mich mal interessieren ob bei Dir das Assembly-Modul funktioniert.
OK, jetzt muss ich mich erstmal in Ruhe durch Deinen Crashkurs durcharbeiten und dannmal schauen, ob ichs schaffe, ein Bauteil an Ort und Stelle zu positionieren.
andererseits liegt mir Blenders Workflow eher, wenn auch Blender schwierig zu lernen sein mag … aber mit den hochklassigen Tutorials von z.B. blenderguru oder cgcookie blender ist das wirklich nur eine Frage der Zeit, bis man selbst versuchen kann, IceAge zu verfilmen. >
Die Herangehensweise von FreeCAD ist natürlich für Ingenieurskunst wohl um einiges besser geeignet. Aber mit meinem Gruppen-Umweg und meine ausstehenden Automatisierungs-Addons für Bemaßungen und Export von 2D-Ansichten sollte das in Zukunft auch lösbar sein. FreeCAD benutzt für FiniteElementAnalysis ja auch ein fremdes/externes Programm (Z88 oder Calculix, beides von deutschen Unis und Open source).
Ich brauch im Moment weder Animation noch FEM sondern will erstmal einfach nur Sachen konstruieren und vernünftig visualisieren können, im Sinne von Konstruktionsplänen. Wenn Du ein einzelnes Bauteil lieber in Blender konstruieren magst, dann spricht ja nix dagegen, immerhin gibts ja die Exportformate. Und da FreeCAD noch ein bischen grün und wackelig zu sein scheint bin ich dankbar dass Blender schon etwas ausgegorener ist. Aber da ich in FreeCAD ein gewisses Zukunftspotential sehe ists sicher nicht verkehrt mich jetzt schonmal da einzuarbeiten. Tja, und in Blender natürlich auch, wobei ich es als positiv ansehe, dass zumindest Du davon schon mehr Plan hast.
Also, irgendwie werden wir uns schon da durch wurschteln
Ob FreeCAD oder Blender, irgendwie kriegen wir’s schon gebacken. Beides benötigt Einarbeitungszeit. Beides ist mächtig, beides kann man kombinieren. Aber für den Export von Herstellungsdateien ist FreeCAD genauer, da pur parametrisch.
Genau!
Warum fusionieren nicht endlich LibreCAD und FreeCAD … Linus Thorvald oder David Freeman werden sich da wahrscheinlich einschalten müssen, um den Lizenzkrieg zu beenden. Wir brauchen endlich das Welt-Repository, wo alle OpenSource Entwicklungen kataalogisiert sind. Deine Linkliste letztens war da schon ein super Anfang!
Also, mehrere parallele Entwicklungen sind ein evolutionäres Grundprinzip bei OpenSource und positiv im Sinne der Artenvielfalt. D.h., auf lange Sicht werden etwaige scheinbare Synergie-Effekt-Verluste mehrfach kompensiert dadurch, dass am Ende die jeweiligen Programme auf einen bestimmten Bereich besonders optimiert und leistungsfähig sind. Und dabei ist es eine normale Arbeitsweise, ein Objekt mit mehreren Programmen zu bearbeiten.
Entscheidend ist dabei nur, dass offene Standards und gut dokumentierte Schnittstellen verwendet werden, aber auch hier wirkt sich die Artenvielfalt sozusagen pädagogisch günstig aus - die OpenSourcler sind einfach von vornherein dazu gezwungen, ganz im Gegensatz zu proprietären Produkten.
Hast recht. Dabei wird manchmal auch nach parametrisch umgewandelt, wenn das Format nicht Knoten und Kanten, sondern nur Parameter speichern kann. Wie das bei Remigiusz’ DXF-Exporter ist, kann ich momentan noch nicht sagen. Für Drohnen aus Glasfaser (GFK) im Steckprinzip hat’s gereicht. Erst wenn die Präzision sehr kritisch wird, muss man von Hand in Parametrisch umwandeln (mit ALT+C nach BezierCircle z.B.).
Die Wikiseite ist eine gute Idee.
Noch ein paar Tipps:
Ein Objekt zu genau der selben Position wie ein anderes verschieben: SHIFT + S (gängig ist: Objekt an Zielposition auswählen —> SHIFT+S +Cursor to Selected —> zu verschiebendes Objekt auswählen → SHIFT+S +Selected to Cursor.)
Genauigkeitskorrekturen: SHIFT+S +Selected to Grid
Genaueres Positionieren: ORTHOGONAL VIEW (Tasten 1, 3, 7, 9, kann man unter Settings STRG+ALT+U umstellen zwischen Numpad oder Ziffernzeile, falls man kein Numpad hat.) Zwischen ORTHO und PERSPECTIVE kann man mit 5 auf dem Ziffernblock hin- und herschalten.
Würd mich mal interessieren ob bei Dir das Assembly-Modul funktioniert.
Welche Version benutzt du? Ich verwende die täglichen ‚Builds‘/Kompilationen. Installierbar in UNIX via:
Bei einigen Open source Projekten lohnt sich das. Man muss auch nicht unbedingt jeden Tag updaten. Wann immer man
$ sudo apt-get update
sudo apt-get upgrade
oder andersherum aufruft, wird die neue Version heruntergeladen (von allen Repositories/Programmen).
Es ist wahr, dass die Artenvielfalt nicht schlecht ist. Im Grunde zumindest. Im Gegensatz zur physikalischen Welt, stellt sich aber mehr und mehr die Frage nach der Zeit und nach Ressourcen (wir wissen ja, das momentan die theoretisch maximale Geschwindigkeit von Prozessoren erreicht ist, endlos kann man ein Programm nicht mehrkerniger verarbeiten lassen (multicore)).
Der Aufwand für jedes Design erstmal in LibreCAD anzufangen, dafür aber wegen der Ressourcen bei großen Projekten FreeCAD schließen zu müssen. Dann in FreeCAD das Teil zu laden und im Part Editor/Workbench zum 3D-Teil ausbauen. Wenn man das Teil ändern will, das selbe Prozedere von vorn.
LibreCAD würde im Sinne der Evolution aussterben und wird es auch bald, denn es ist nur für 2D - und auch wenn es dort stark sein mag, FreeCAD wird nicht lange auf sich warten lassen.
Im Sinne von Robustheit bei redundanten Systemen (z.B. in der Raumfahrt bei Extrembedingungen wie z.B. Hitze auf der sonnenzugewandten und Eiseskälte auf der anderen Seite eines jeden Bauteils) ist natürlich auch Artenvielfalt in der Software erwünscht, insofern es den gleichen Zweck erfüllt.
Mit unseren begrenzten Ressourcen in der Open Source Bewegung (da man davon i.d.R. nicht Leben kann) führt es zu fehlenden Kräften bei Projekten, die viel weiter sind. Projekte, die die gleichen Ziele, aber kaum mehr Entwickler haben und dann auch noch weit hinterher (2D anstatt 3D) sind, immer den neuen Technologieanforderungen mitzuziehen (z.B. Umbau auf Mehrkern-Architektur) führt unweigerlich zu Chaos. Eine Lösung dafür wäre, die Rosettensteine ins vielversprechendere, modularere und einfach gestricktere Programm zu übernehmen und das dann Voranzutreiben.
FreeCAD gefällt mir allerdings immer besser. Gut ist auch, dass es aus Modulen besteht, die wiederum Open Source sind. (OpenCascade z.B.) Wenn man die Dokumentation einmal durchhat, wird’s schon endlich klappen, hoffe ich. Momentan habe ich noch nicht so viel hinbekommen in FreeCAD, z.B. wollte ich die Transparenz der Objekte in der 3D-Ansicht ändern, aber egal was ich einstellte, es änderte sich nichts. Aber ansonsten, umso mehr Tutorials ich durchgehe, desto interessanter finde ich das komplette Constraint-Modelling. Alles was man irgendwo ändert, wird bis zum 3D-Modell hochgespiegelt. Im blender ist es ja eigenltich genauso. Nur dass da ‚Revolve‘ z.B. ein Modifier ist. Und der ‚Sketcher‘ ist der ‚Edit mode‘ (switch using TAB).
Mir ist noch eingefallen, dass die größte Schwäche in Blender bzgl. Modellieren, Arcs/Bögen sind. Verdammt schwierig, das in blender parametrisch hinzubekommen.
Edit FreeCAD Assembly Workbench:
Habe gesehen, dass daran momentan noch gearbeitet wird. Klingt vielversprechend, was sie vorhaben. Das wird echt ein Knackpunkt für FreeCAD. Hätten sie die ganze STEP-Funktionalität in Blender eingebaut und blender in Richtung Parametrisierung erweitert, hätten sie blenders Dependency Graph und bullet/ODE-Implementation verwenden können. Jetzt müssen sie alles nochmal vom Damm brechen. Und das wird nicht so schnell gehen. Trotzdem prima FreeCAD. Nur nicht aufgeben. Die Constraints (Face to Face, Vertex to Vertex, …) hätten sie bestimmt auch schnell in Blender einbauen können. Momentan arbeitet Sergey am Motor-Constraint, Achsen-Constraint gibt’s schon. Dass Sergey lange für die Bullet-Integration gebraucht hat, ermutigt mich jedoch, FreeCAD etwas Zeit zu geben und solange blender weiter voran zu treiben.
Ergebnis: Assembly Modul geht leider in der offiziellen Version noch nicht. Sollte es gehen, dann wäre das echt prima. FreeCAD kommt erst richtig in Schuss. Hat bestimmt momentan auch eine Alternative zum Assembly-Modul!? Sonst hätten sie auch nicht die Architektur so hinbekommen. Vielleicht das Architektur-Modul?
This would make it easy to move single parts around: just adopt its placement. However, in FreeCAD most designs are done with many features (pads, pockets etc.), how would on handle that? Move every feature? Only the last one? Both way would introduce some very problematic modeling behavior, therefore a third way is used: don’t move features at all! Instead the concept of a Body was introduced into general modeling, everything done in part design is now grouped beneath it. This object has a placement property too and can be transformed.
Das ist schockierend! Das ist genau wie blender es macht. Genau das gleiche in Grün. Das Body-Objekt ist genau das Selbe wie eine Gruppe in Blender (mehrere Objekte auswählen und STRG+G, um zu gruppieren). Das Body-Objekt wird in FreeCAD dann im Assembly-Modul verwendet und manipuliert. Das entspricht einer Gruppen-Instanz in Blender. In blender gibt es genau wie in FreeCAD lokale und globale Koordinaten für jedes Objekt.
FreeCAD hat einiges besser geeignet für Ingenieurswesen und Architektur umgesetzt als blender (z.B. Parametrisch, Aufleuchten von Teilen bei MouseOver vll., … automatisierte Auflösung von Gruppen-Instanzen/Body-Objekten im Assembly-Modul für Manufaktur anstatt der Empties, die bei Blender noch nicht automatisch aufgelöst werden) - aber im Grunde frage ich mich langsam aufgrund der subtilen Unterschiede, ob man das nicht doch lieber in blender einbauen hätte sollen? (Dann noch die Bögen verbessern, die Bemaßungen automatisieren (was man bei FreeCAD auch manuell machen muss). 2D-Herstellungsdateiein wie Witold Jaworskis Blueprint-Anleitung automatisieren und man hat alles was man braucht - und eine gelungene Render-Engine noch dazu. blender short movies).
Witold Jaworski hat auch ein ausführliches Buch geschrieben, wie man Flugzeuge haarklein nachmodelliert. Ist gerade erst der 3. Teil erschienen. Als Dank an die Community hat er sein Buch in seiner Muttersprache (Polnisch) auch kostenlos ins Netz gestellt. Aber auch wenn man die Sprache nicht versteht, kann man trotzdem Dank der vielen Bilder noch einigermaßen folgen. http://airplanes3d.net/wm-000_e.xml
Habe jetzt auch endlich Informationen zu Vertex-Parenting gefunden. Das könnte das Automatisieren der Bemaßungen vereinfachen.
Ein zwei technische Anmerkungen aus der FreeCAD ecke:
Hätten sie die ganze STEP-Funktionalität in Blender eingebaut und blender in Richtung Parametrisierung erweitert, hätten sie blenders Dependency Graph und bullet/ODE-Implementation verwenden können. Jetzt müssen sie alles nochmal vom Damm brechen.
Blender wird Step nie unterstützen können, da step ein Format für Brep (Boundary Representation) geometrie ist, also für mathematisch exakt beschriebene Flächen/Kurven. Eine Fläche hat einen Punkt und einen Richtungsvector. Nicht mehr. Blender verwended Meshes, wird also nie nach Step exportieren können. Das wird auch durch die scheinbar kommenden parametrischen Funktionen von Blender nicht anders werden, denn alle Kanten von Schnittpunkten einzelner parametrischer Objekte müssen auch parametrisch beschrieben werden, un das kann Blenders Ansatz nicht leisten.
Diesen Elementaren Unterschied müst ihr immer mit in Betracht ziehen und je nach Anwendungsfall das besser geeignete nutzen: Brep vs. Mesh.
Die Constraints (Face to Face, Vertex to Vertex, …) hätten sie bestimmt auch schnell in Blender einbauen können.
Nein. Das Constraint-System von FreeCAD wird um einiges komplexer als das in Bullet. Das liegt daran das es in CAD Programmen möglich sein muss viele unterschiedliche Constraints zwischen belibig vielen Objekten zu setzten und so auch belibige „kreisförmige“ Abhänigkeitsgraphen zu erzeugen. Das kann der Bullet-Solver so nicht mehr auflösen (dieser ist ja eigentlich auch für die physik-simulation gedacht), daher wird es eine komplette Neuentwicklung (die erste die es OpenSource geben wird die das kann, bzw. hoffentlich können wird, ist ja nocht nicht fertig )
Ja, ersteres ist richtig. Gehe nun auch den Weg, den Yorik De Havre geht: in blender modellieren und in FreeCAD importieren und in parametrische Objekte umwandeln. (Dann später FEA und andere Analysen nutzen, sobald das funktioniert.)
Für das Constraint-System habe ich mir für blender schon zumindest eine Verbesserung überlegt, das in etwa das FreeCAD-Draft-/Sketcher-Constraint-System nachahmt. Werde ein Addon dafür schreiben (Essenziell ein Addon zum leichteren „Constrainten“ von Vertex-Gruppen.). Momentan noch weniger Zeit für OSE Projekte als gedacht, aber immerhin ein modularer Baukasten-Stadel und ein neuartiges Gemüsebeet-System ist im Aufbau.
Auch Metalldetektoren habe ich für historische Erkundungstouren recherchiert und mein Erfinderkollege kümmert sich bald intensiver um Elektro-Mobilität. (sobald mein Auto keinen TÜV mehr hat, könnnen wir experimentieren)
Danke icky. Ich hoffe, FreeCAD verfügt bald über eine funktionierende kreisförmige Constraint-Auflösungsfunktionalität.
HOG 3D PlaDruMas hat einen Rivalen bekommen, ein simplistisches System mit minimalem Materialaufwand. Beide werden im Laufe der nächsten Wochen gebaut. Zeit, zurück ans Reißbrett zu gehen.
Nachdem die derzeitigen enttäuschenden Entwicklungen im Open-Source-Bereich (Redundanz!, keine wirklich skalierbaren und funktionierenden Hochleistungssysteme) anhalten, hoffe ich, dass wir ein reines Linux-Echtzeitsystem zur Steuerung der Fräse, des 3D-Druckers und des AMOR-Melkroboters demonstrieren können.
Der Softwareplan:
Linux-Kernel + RT-Patch → Wesentliche Pakete hinzufügen. → LinuxEMC hinzufügen.
Der Hardwareplan:
Tablet oder Smartphone (Beides sind einfach Computer, es besteht keine Notwendigkeit, Programme als „Apps“ zu bezeichnen, nur weil sie auf ARM-Architektur basieren. Nur der Formfaktor unterscheidet sich. Was da draußen passiert, ist nichts weiter als Zeitverschwendung durch das Neuerfinden des Rades (Programme) aufgrund von Verwirrung durch Marketingbegriffe. Wir werden Linux Realtime verwenden – Jitter/Latenz ist für unsere Anwendungen in Ordnung.)
Der Vorteil der Verwendung eines kleinen / tragbaren Computergeräts besteht darin, dass keine WLAN-Verbindung erforderlich ist – modellieren Sie einfach auf Ihrem High-End-Modellierungs-/Engineering-Computer. Nehmen Sie Ihr Smartphone heraus, verbinden Sie es per USB. Übertragen Sie das Modell. Gehen Sie zum Standort des 3D-Druckers/der Fräse, befestigen Sie das tragbare Gerät an der Struktur und fügen Sie Materialien und Ähnliches hinzu.
(Grüße an Electrodacus, Olli, eine neue Version des Windrechners ist in Arbeit. Wird bald auf Github hochgeladen.)
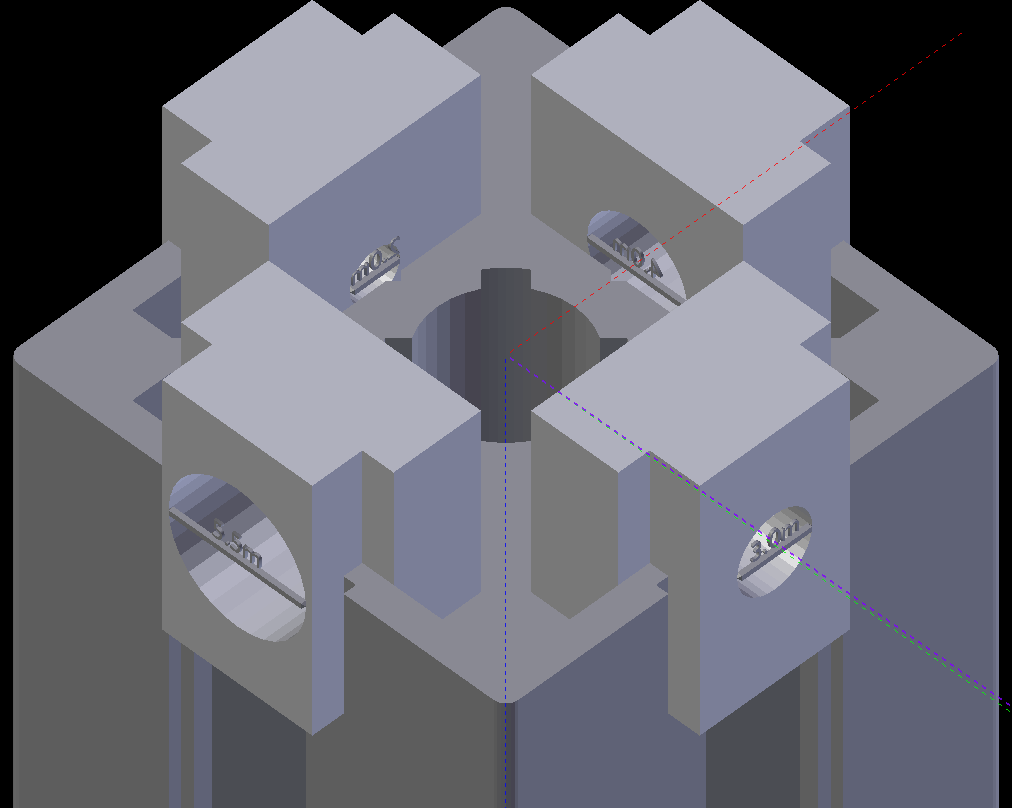
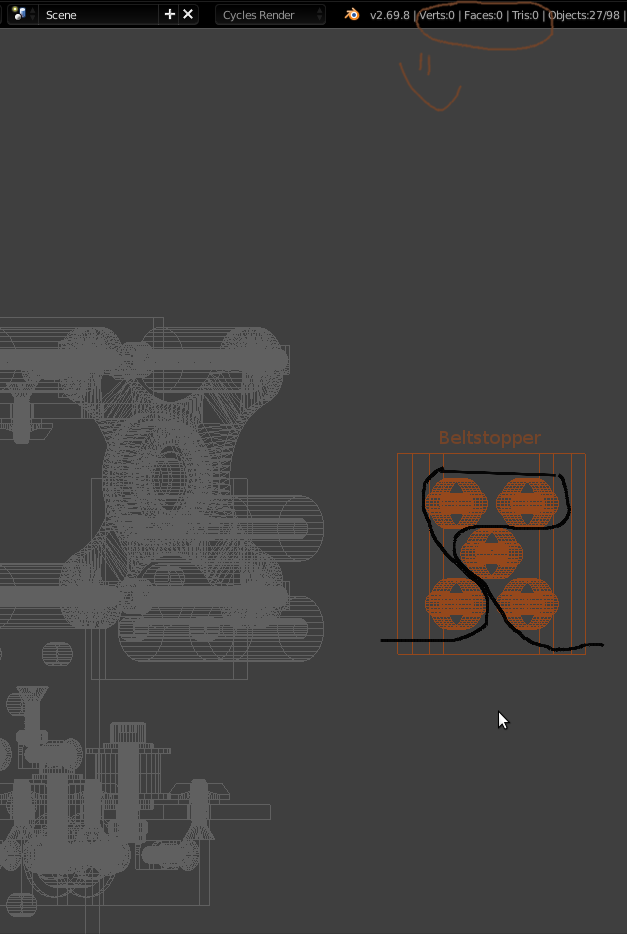
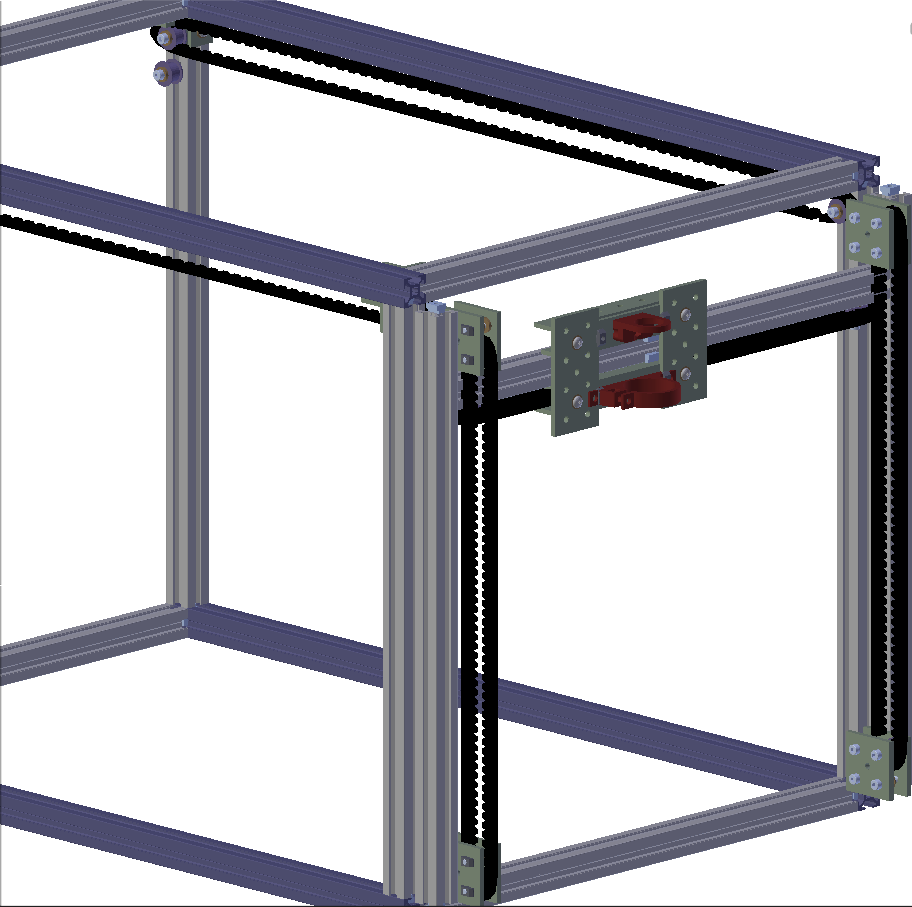
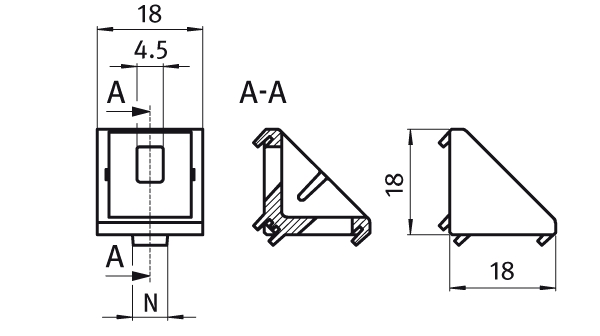
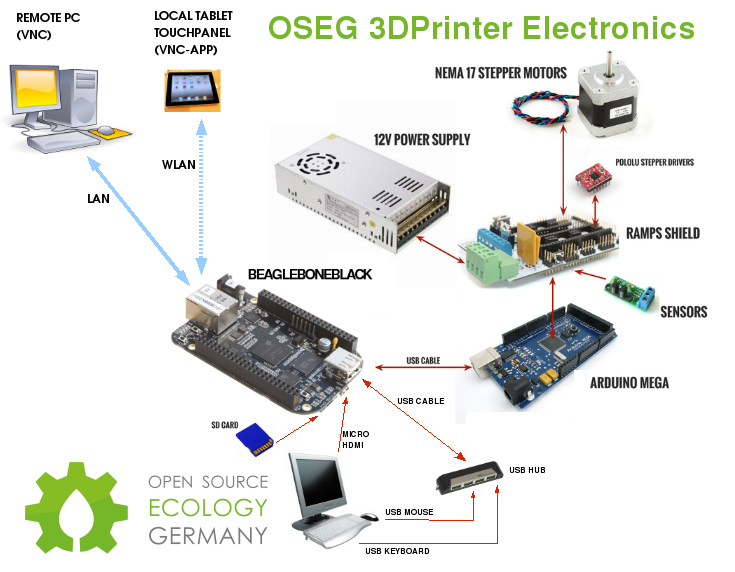
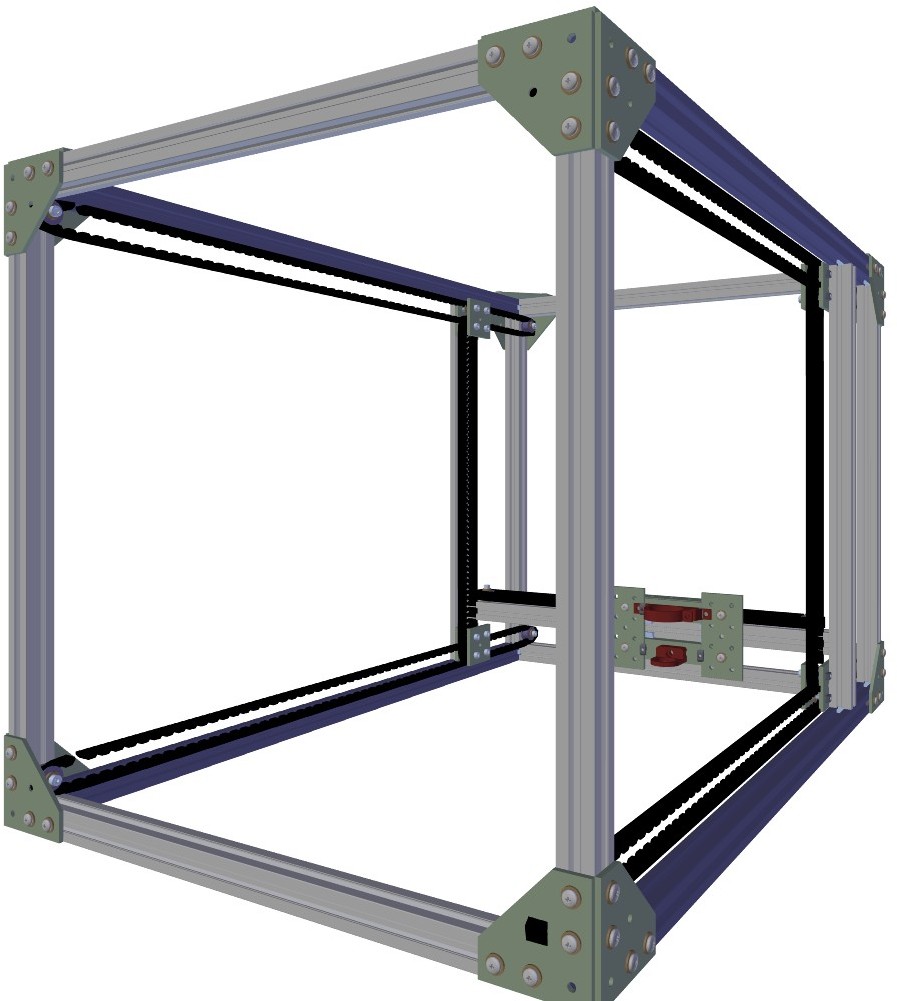
{kind=link}