Ich habe noch ein paar Punkte vergessen:
- Wir können sogar das gesamte Ventilsystem an den Zitzenbechern weglassen. Da solche Vorrichtungen nicht verfügbar sind und nicht einfach selbst hergestellt werden können. In einigen Ländern, wie Australien und Kanada meines Wissens nach, werden die Zitzen überhaupt nicht stimuliert oder gereinigt, da Weidekühe recht sauber sind, weil sie auf Gras liegen.
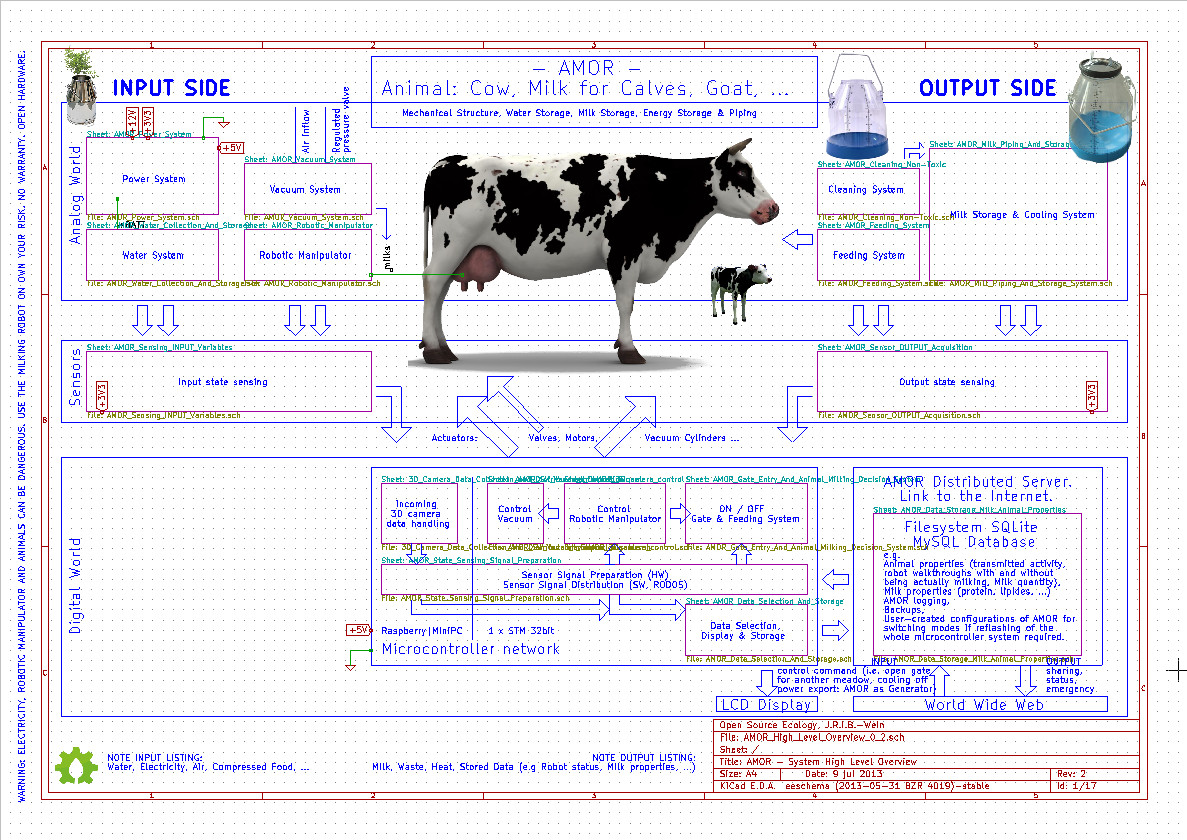
- Ich habe den anderen Durchbruch vergessen: Wir werden uns auf ein reines Gleichstromsystem (DC-only) festlegen. Das löst unser Energieproblem, da wir keinen Wechselstrombedarf (AC) mehr haben. Außerdem reicht ein 250-W-Motor als Vakuumpumpe aus (liefert 16+ Zoll Hg Vakuum und wir benötigen nur 10..13 " Hg). Das einzige verbleibende Problem auf der Seite des Energieverbrauchs ist also die Kühlung und Reinigung, d. h. eine Wasserpumpe. Die Schrittmotoren haben ebenfalls eine bescheidene Nennleistung (2A * 24V = 48W) und wir haben ungefähr fünf davon (1x Tür, 3x Roboter, vielleicht 1x Fütterungssystem).
Dieser Stromverbrauch summiert sich auf: P = 250W (Vakuum) + 250W (Wasserpumpe) + 5 * 50W (Schrittmotoren) = 750W (< 1KW).
Der Stromverbrauch der Elektronik ist vernachlässigbar. Besonders wenn wir die Einbeziehung eines üblichen Kühl- und Rührsystems für sagen wir 5000 l Milch berücksichtigen.
Dies fügt hinzu: P_Milchtank = 2..3 KW (Kühlung) + 250..750 W (Mischer) = 2250..3750 W.
Das ist eine Menge!
Insgesamt ergibt dies: P_gesamt = 3000..4500 W (also ein Minimum von 3KW und ein Maximum von 4,5KW).
Das lässt mich denken, dass es besser ist, entweder einen kleinen, leicht zu kühlenden Tank zu haben oder Solarkühlung zu verwenden oder den Melkroboter in der Nähe des Hauses zu halten und ein Stromkabel zu verlegen! Eine weitere Lösung könnte die Verwendung eines Schlauchs sein, um die Milch direkt in die Melkkammer zu leiten. Es sind keine Rohre erforderlich, auch wenn der begrenzte Schlauchdurchmesser (z. B. Garten-, aber lebensmittelecht!) den Milchfluss stark einschränkt. Dies liegt daran, dass der Melkroboter genug Zeit hat, die Milch loszuwerden, da zwischen zwei aufeinanderfolgenden Tiermelkungen genug Zeit ist. Außerdem wird auf dem mobilen Roboter ohnehin ein kleiner Tank für das Vakuumsystem benötigt. Wenn wir den Standort des Melkroboters klug wählen, brauchen wir nicht einmal eine Pumpe (Höhenunterschied)!
Wenn wir die Energie des Vakuumsystems und der Elektronik von der Kühl- und Tankreinigung entkoppeln, wie oben skizziert, dann können wir einen wirklich mobilen Roboter erhalten. Ohne die Notwendigkeit einer festen Energieverbindung. Gleichstrom ist dafür nicht zwingend erforderlich, vereinfacht den Prozess aber sehr, da die meisten alternativen Energiegewinner Gleichstrom erzeugen, ebenso wie die Elektronik und die Schrittmotoren (da dort nur einzelne Phasen bestromt werden, obwohl sie mehr als zwei Drähte haben). Dies erhöht die Effizienz und verringert die Komplexität, da keine Umwandlung von AC zu DC und dann wieder von DC zu AC (wie bei der Motorsteuerung) mehr erforderlich ist.
Zusammenfassend lässt sich sagen, dass das reine Gleichstromsystem viele Vorteile hat, von denen einige oben genannt wurden, und die Möglichkeit eröffnet, die Energieversorgung des Großteils des mobilen Roboters von starken Stromverbrauchern wie dem Kühlsystem zu entkoppeln. Die AC-Lasten können weiterhin über ein gewöhnliches Stromkabel gespeist werden, das sowohl für 1-Phasen- als auch für 3-Phasen-Strom (letzteres viel teurer als ersteres) leicht verfügbar ist.
Alternativ könnten die üblichen AC-Lasten ausgelagert werden, was das Gewicht des mobilen Roboters und den Platzbedarf verringert. Ein autonomer, selbstreinigender Milchtank ist natürlich ein Ziel, das zumindest den Milchtank besser abdichtet und Wildtiere (Rehe, Füchse, ..) davon abhält, unser Milchreservoir zu leeren.
Ob es besser ist, diesen autonomen Tank in der Nähe des Roboters zu haben oder ob es billiger und praktischer ist, ihn in einer nahegelegenen Melkkammer aufzubewahren, bleibt zu bestimmen.
Das spricht für den entfernten Milchtank:
- Den Tank in der Nähe oder in einer Melkkammer zu haben, ist keine schlechte Sache (besonders im Winter und bei stürmischem Wetter)
- und reduziert das Gewicht
- und die Größe des Melkroboters.
- Es spart auch das AC-Stromkabel zum Melkroboter
- und verringert auch den Wasserbedarf.
All dies hat seinen Preis:
- Ein lebensmittelechter Schlauch oder eine flexible Verrohrung ist erforderlich, um die Milch vom Roboter zum Tank zu bekommen. Dies wird durch den nicht mehr benötigten Wasserschlauch kompensiert.
- Aber schließlich könnte eine Pumpe notwendig werden, wenn es keine Möglichkeit gibt, die Schwerkraft (Höhenunterschied) zu nutzen. Dies könnte dadurch kompensiert werden, dass die Reinigungspumpe oder der Wasserkompressor des Melkroboters wiederverwendet/umkonfiguriert wird und irgendwie sowohl für die Reinigung des Roboters als auch zum Pumpen von Milch durch Druckbeaufschlagung eines Luftbehälters verwendet wird (als mögliche Lösung, um nicht in direkten Kontakt mit Milch zu kommen, was wiederum eine lebensmittelechte Pumpe erfordern würde und den Kompressor wahrscheinlich für diesen Zweck ungeeignet machen würde).
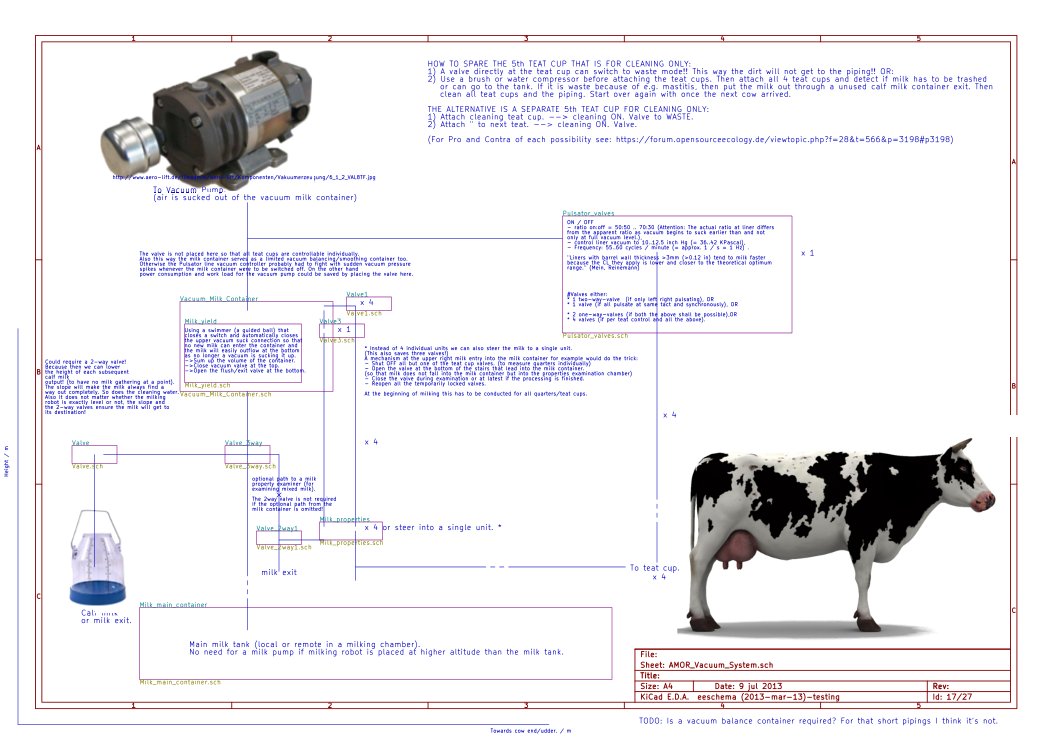
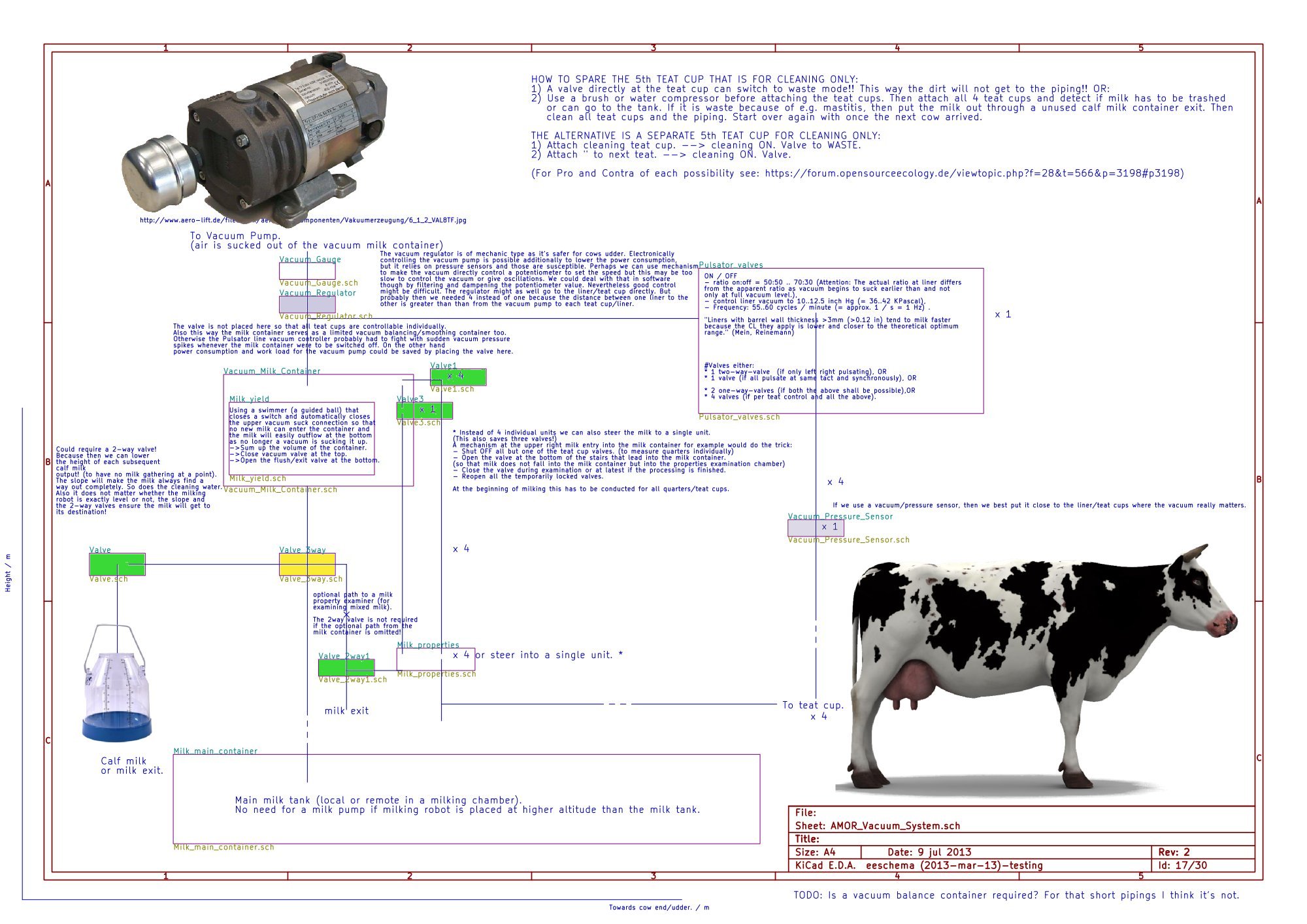
Hier eine Vakuumpumpe, die unsere Anforderungen erfüllt und in Europa hergestellt wird: