===========================================================
THE REPOSITORY IS THE MOST UP TO DATE SOURCE OF INFORMATION!
WARNING: ALL BELOW IS DISCUSSION OR MAY BE OUTDATED!
Dear colleagues,
Liebe OSEG-Freunde,
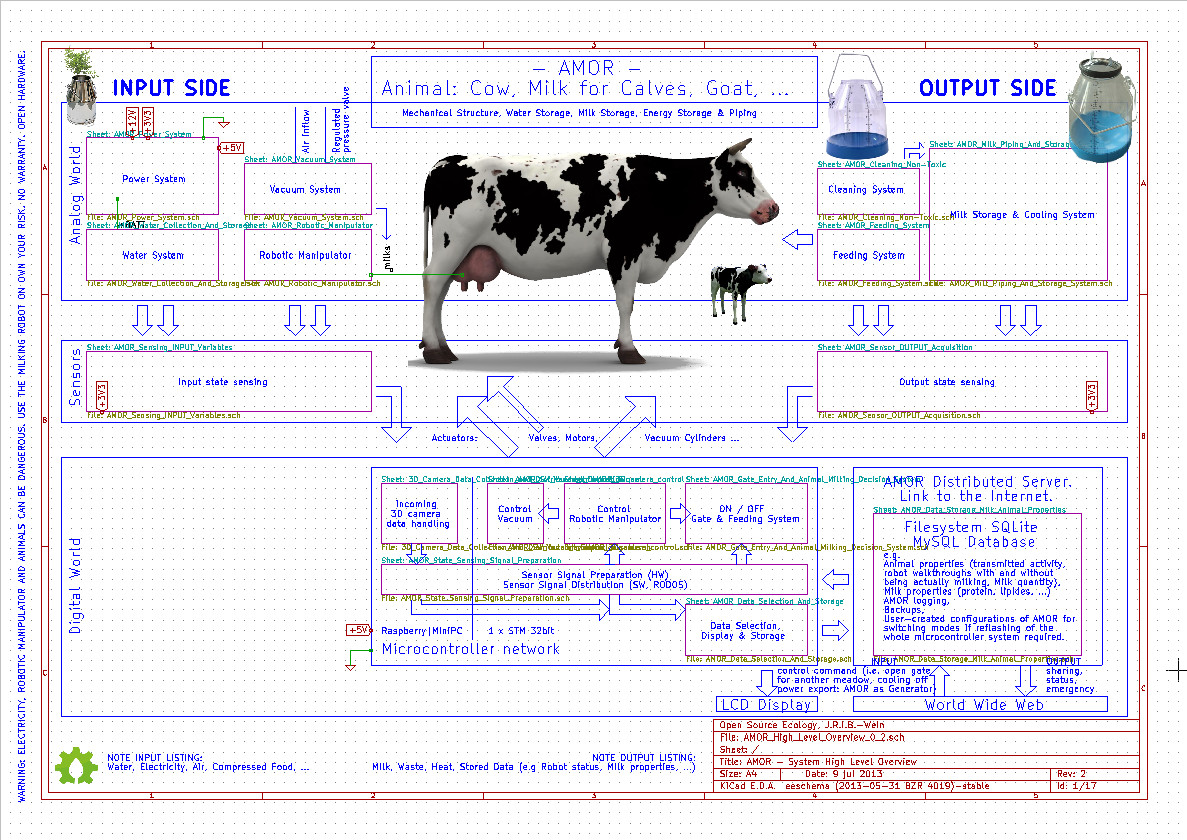
AMOR is a planned indoor / outdoor combinated mobile robot for automatic milking. It features a simplistic robotic manipulator that uses a 3D camera to determine the udder’s position. A milk container of some sort has to be added, but the pipings and vacuum system will be built-in. As will be some outlets for calves’ milk. It harvests water from rain, a river, stream or any other water source, a water inlet for connection to the farm’s water supply will nevertheless be provided.
- let’s start with a problem first: I uploaded a high level schematic of AMOR and added it to its wiki page. I get the following error message:
It’s a vector graphics svg-File. Wikipedia supports it, so I thought ours too. What shall I do now? Any recommendation of our more experienced guys and gals appreciated!
2. The schematic is not completely interlinked, but all required modules should be there. Tell me if you think something’s missing.
3. I hope the high level overview will get the planned prototype in a better order. Depending on my budget and the DC-AC high power sine inverter I hope we get the prototype done before end of winter - if not then summer 2014 is the ultimate goal. Any further delay for the prototype would be … well … annoying.
A list of missing functionality I’m aware of:
- A milk container cleaning system.
- … (tbd)
----------------------- Continuing with the German translation. -----------------------------------